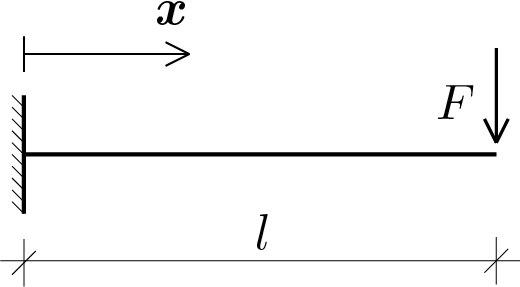
A fourth order differential equation to be solved with respect to boundary conditions which, for the present case, are kinematic conditions at the end \(x=0\) and static conditions at the end \(x=l\) 1
In general at one end the conditions can be also mixed, kinematic and static.
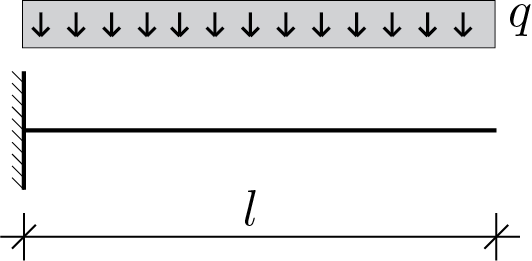
where the applied transversal distributed load is constant. Also in this case the boundary conditions are kinematic conditions at \(x=0\) and static conditions at \(x=l\text{:}\)
The above equations, equilibrium and related boundary conditions, can be formulated in MATLAB® as follows, allowing the calculation of the solution \(\func{w}{x} \) and of the relative bending moment \(\func{M}{x}\text{.}\) Instructions for plotting the two functions are also provided. funzioni. Listing3.8.5.
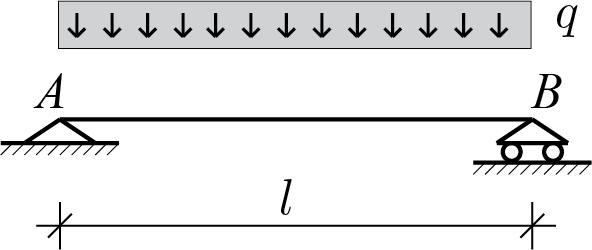
The solution to the problem is obtained on the basis of the same equilibrium equation used in the previous example. It is only necessary to modify the boundary conditions which, for the supported beam, become