On the basis of the displacement field adopted, the data of the problem under examination and the basic assumption
(3.1.1), the writing of the Principle of virtual work
(2.5.5) takes the following expression
\begin{equation}
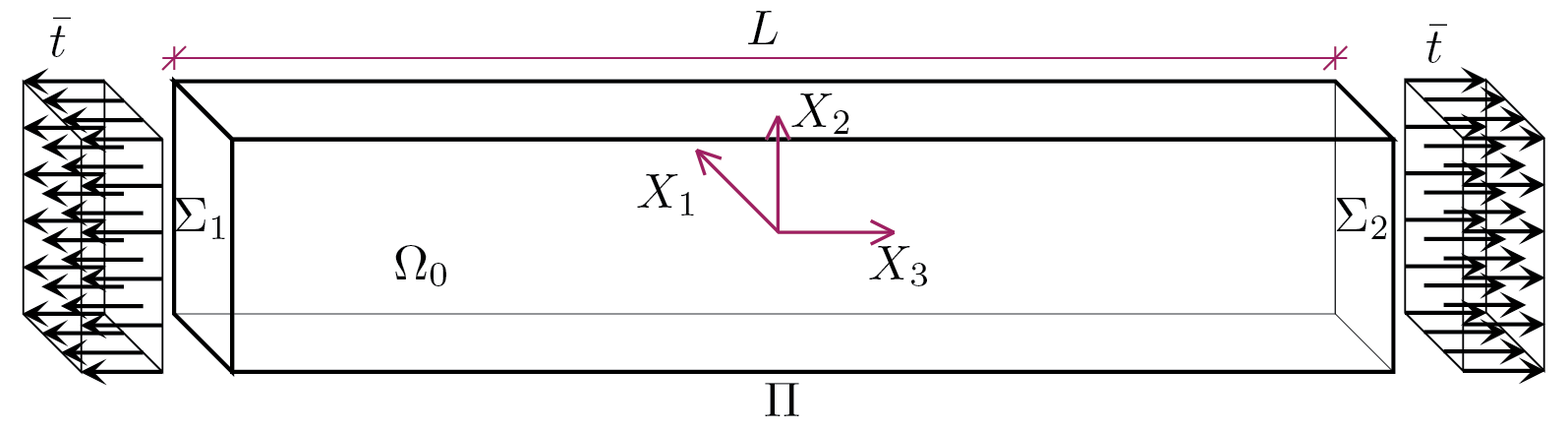
\underbrace{\int_{\Sigma_1} \vec{t}_1 \cdot \vec{u}_1\,dS + \int_{\Sigma_2} \vec{t}_2 \cdot \vec{u}_2\,dS}_{\text{L}_{\text{est}}} = \underbrace{\int_{\body_0} \tens{\sigma} : \text{sym}\tens{\nabla u}\,dV}_{\text{L}_{\text{int}}}\,,\tag{3.1.19}
\end{equation}
where, in particular,
\begin{equation*}
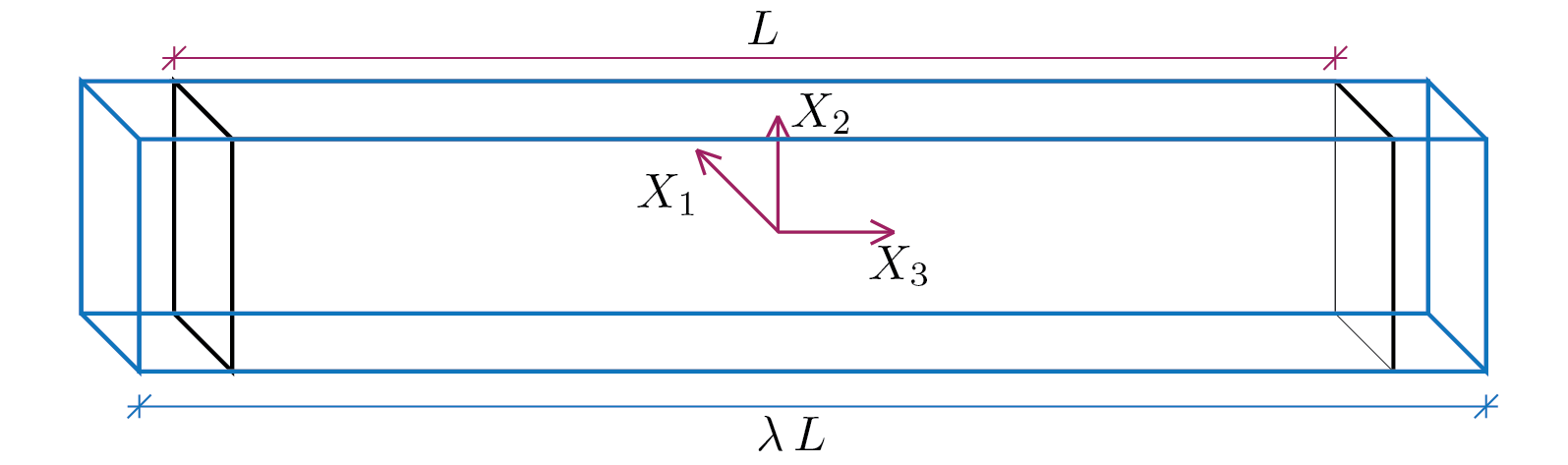
\matWp{u}{1} = \left[\begin{array}{c}0\\0\\-(\lambda - 1)\frac{L}{2}\end{array}\right]\,,\;
\matWp{u}{2} = \left[\begin{array}{c}0\\0\\(\lambda - 1)\frac{L}{2}\end{array}\right]\,,\;
\text{sym}\tens{\nabla u} = \tens{\nabla u}\,.
\end{equation*}
Then introducing the static solution already found and the expression above reported of the gradient of the displacement the following result is obtained
\begin{equation}
\int_{\Sigma_1} \bar{t}\,(\lambda - 1)\frac{L}{2} \,dS + \int_{\Sigma_2} \bar{t}\,(\lambda - 1)\frac{L}{2} \,dS = \int_{\body_0} \bar{t}\,(\lambda - 1) \,dV\,.\tag{3.1.20}
\end{equation}
From which, evaluating the involved integrals (all with constant argument), it can be obtained what follows
\begin{equation}
\bar{t}\,(\lambda - 1)\frac{L}{2}\,S + \bar{t}\,(\lambda - 1)\frac{L}{2}\,S = \bar{t}\,(\lambda - 1)\,\,S\,L\,,\tag{3.1.21}
\end{equation}
i.e.
\begin{equation}
\underbrace{\bar{t}\,(\lambda - 1)\,\,L\,S}_{\text{L}_{\text{est}}} = \underbrace{\bar{t}\,(\lambda - 1)\,\,S\,L}_{\text{L}_{\text{int}}}\,,\tag{3.1.22}
\end{equation}
Therefore it is also possible to verify the equality between external and internal work but we do not draw any further information regarding the \(\lambda \) parameter.