The equilibrium equations for the beam have already been presented in Section 3.5 and Section 3.6 in the broader context which led to the construction of a complete 2D elastic beam model. Here the equations are obtained by other means, moreover the shear force is taken into account in a explict way.
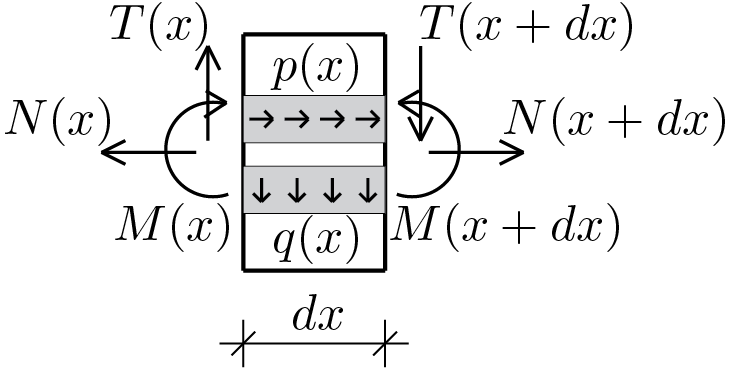
Let us consider a beam subjected to generic loading conditions, let us assume to isolate a portion of the beam with infinitesimal length \(dx\text{.}\) The beam’s portion thus identified is subjected to a series of actions shown in the figure and which, for clarity, are listed below:
generalized section forces, \(N(x)\text{,}\)\(T(x)\) e \(M(x)\text{,}\) relative to point \(x\) along the beam axis;
The obtained scheme is essentially a free body diagram for which it is possible to impose the following equations of equilibrium (the pole used for the rotational equilibrium is placed at the abscissa \(x + dx \))
The hypothesis of continuity of the one-dimensional solid and of the quantities defined on it, allows to use Taylor series truncated to the first order of the generalized section forces evaluated on the section \(x + dx \) and to obtain therefore
where the quantities \(\frac{d N}{d x} \text{,}\)\(\frac{d T}{d x} \) and \(\frac{d M}{d x} \) denote the derivatives of the generalized section forces with respect to the abscissa \(x \text{.}\) Making the necessary simplifications and neglecting the term \(q(x)\frac{dx^2}{2} \) because of higher order than the first, we obtain the equilibrium differential equations for the 2D beam listed below .
The integration of the equilibrium differential equations gives the following general integrals valid on portions of beam along which the generalized section forces are analytic in the variable \(x\text{:}\)
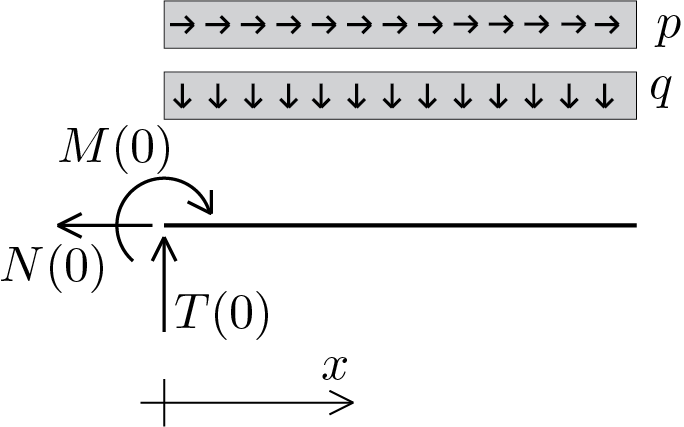
The diagram shows the case of a beam of which the values of the stress components at the extreme \(x = 0 \) are known and is subjected to constant distributed loads. In this case the general integrals (5.8.10), (5.8.11) and (5.8.12) take the following expressions