Equilibrium equations have already been discussed in the Chapter 2 dedicated to continuous bodies. We could therefore proceed by particularizing the equations (2.2.1) and (2.2.2) to the case of systems of bodies subject to concentrated forces. Instead, we prefer to derive the equations of equilibrium autonomously by applying the principle of virtual work already discussed for continuous bodies in the Section 2.5.
Subsection5.1.2scalar form of equilibrium equations
Consider for each point of the system an arbitrary displacement \(\delta\vec{u}_i \text{,}\) and sum the scalar product of each force \(\vec{F}_i \) with the corresponding virtual displacement introduced. By virtue of the (5.1.1) it is possible to formulate the following scalar equation:
Subsection5.1.3introduction of rigid body kinematics
If at this point we assume that the point system under examination are points belonging to a rigid body then it is possible to express the field of virtual displacements, see the equation (4.1.6), as follows:
The fulfillment of this last scalar condition for any \(\delta\vec{u}_o \) and any \(\delta \varphi \vec{w} \) requires the fulfillment of the following vector equations.
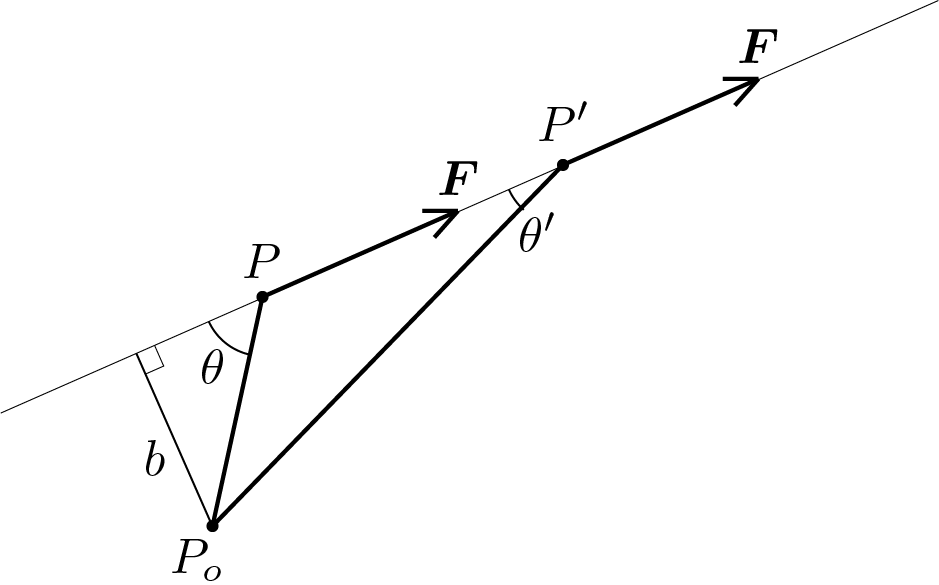
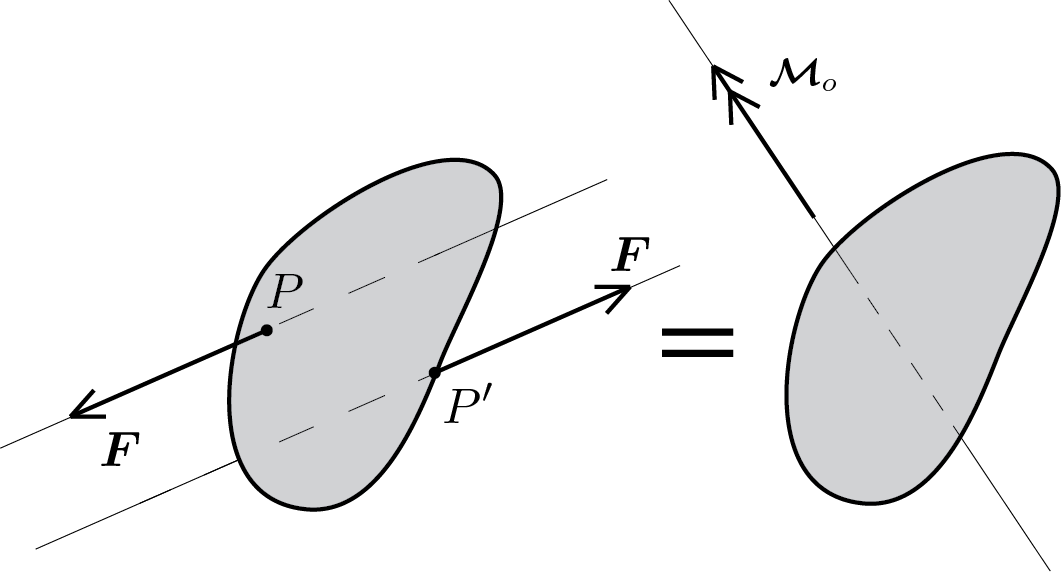
Given a force \(\vec{F} \) applied to point identified by vector \(\vec{X} \) and given a pole identified by \(\vec{X}_o \text{,}\) it is possible to evaluate the moment, or torque, of \(\vec{F}\) with respect to the chosen pole by calculating the following vector product
Then \(b\) is the distance between the pole \(P_o\) and the line of application of the force \(\vec{F}\text{.}\) It worth of notig that if \(\theta=0\) or \(\theta=\pi\text{,}\) i.e. vectors \(\left( \vec{X} - \vec{X}_o\right)\) and \(\vec{F}\) are parallel, the moment \(\calvec{M}_o\) is null.