If we consider the case in which there are only two non-zero components of the applied forces and of the positions of the points of space, the vector equation (5.1.7) can be expressed only by means of two scalar equations and the vector equation (5.1.8) boils down to one scalar equation, i.e.
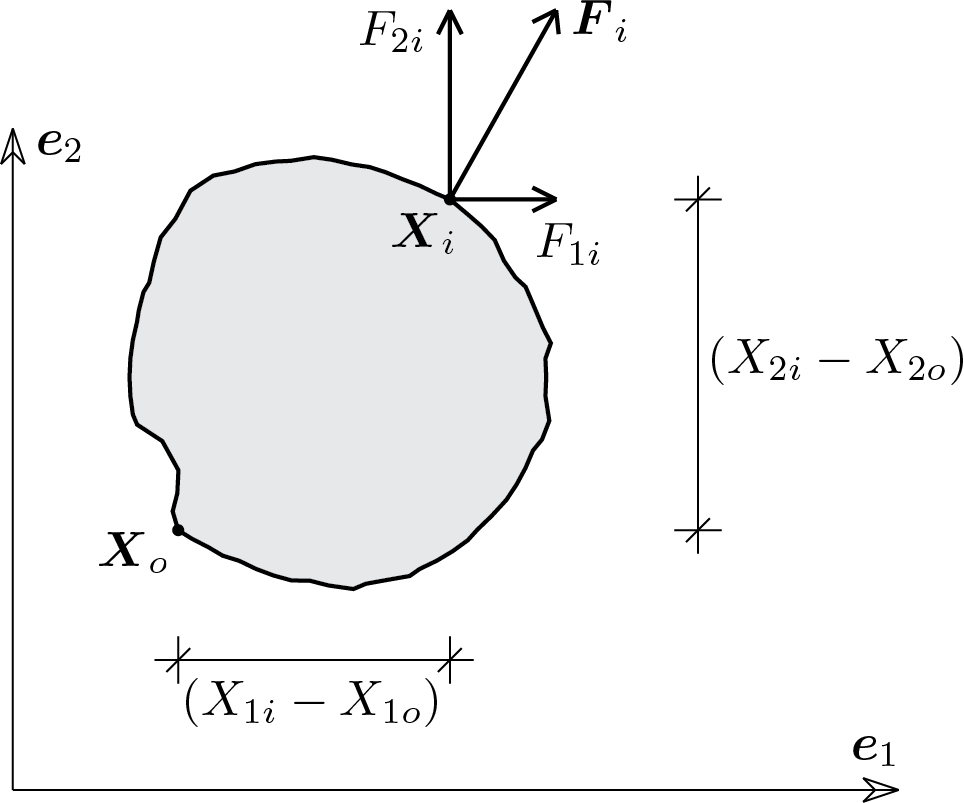
The condition (5.2.1) expresses the cancellation of the sum of all the horizontal forces applied, that is the components along the axis 1 of the applied forces. The condition (5.2.2) requires the cancellation of the sum of all the vertical forces applied, that is the components along the axis 2 of the applied forces. The condition (5.2.3) expresses the cancellation of the sum of the moments exerted by the horizontal and vertical forces with respect to the point chosen as pole. The following figure illustrates for the case of a single force the meaning of the terms present in the equations.
The following MATLAB® instructions allow to evaluate the resultants of horizontal forces, vertical forces and moments starting from the loads applied to the individual points of a rigid body. Listing5.2.2.
$ % vector of resultants =
% [horizontal; vertical; moment]
R = zeros(3,1);
% function for the calculation of the moment of a generic force
moment = @(X0, X, Load)...
-Load(1)*(X(2)-X0(2))+Load(2)*(X(1)-X0(1));
% coordinates of the points on which the loads are applied
syms L;
A = [0; 0];
B = [L; 0];
C = [L; L/2];
% choice of pole
POLE = A;
% for each point a vector, Load = [F1; F2; M], is assigned
% to be summed to the resultants' vector
syms F;
LoadA = [F; F; 0];
R = R + LoadA;
R(3) = R(3) + moment(POLE, A, LoadA);
R
LoadB = [-F; -F; 0];
R = R + LoadB;
R(3) = R(3) + moment(POLE, B, LoadB);
R
LoadC = [-F; 2*F; F*L];
R = R + LoadC;
R(3) = R(3) + moment(POLE, C, LoadC);
R
if and(and(R(1) == 0, R(2) == 0), R(3) == 0)
disp('Balanced system')
else
disp('Out of balance system')
end