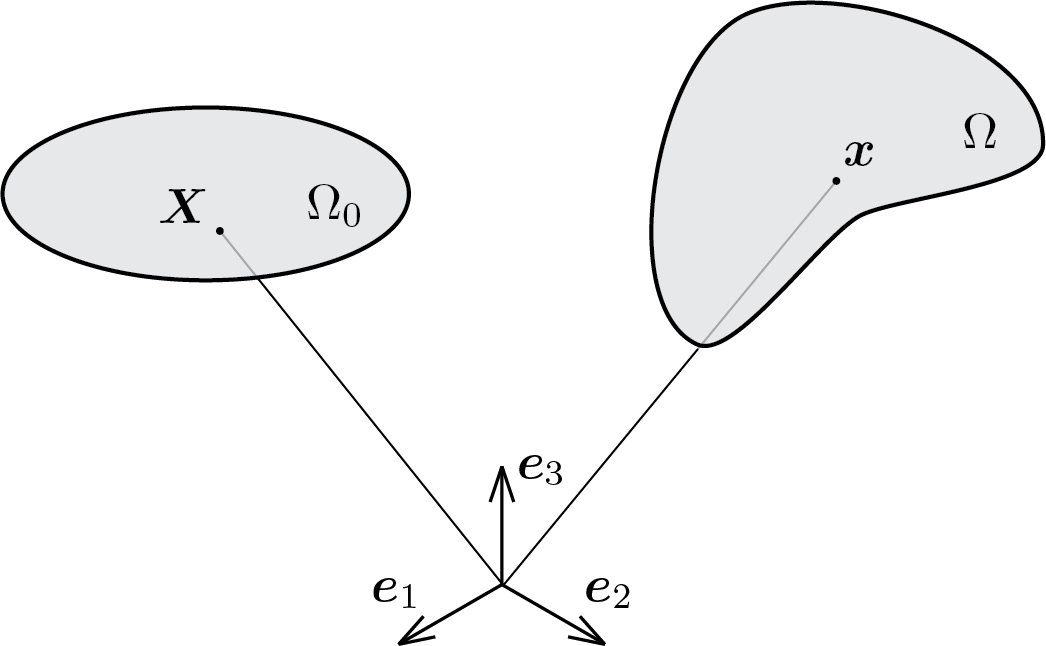
The object of the kinematic analysis is a continuous body which will be named with the symbol \(\body\text{.}\) Each point of the body occupies a position in space which, fixed an orthonormal reference triad \(\vec{e}_a\) (\(a = 1,2,3\)), is identified by a vector. In particular we will talk about two configurations:
the reference configuration\(\body_0\text{,}\) which collects all the positions \(\vec{X}\) occupied by the points of the body before the motion;
$ u = [1 2 3]
v = 4:6
w = u + v
x = 0.5
y = 1.0
z = -2.0
k = x*u + y*v + z*w
% how to access to vector's components
u(1)
u(2)
% the same as u(2)
u(1,2)
% access error
u(2,1)
$ u = [1; 2; 3]
v = (linspace(4,6,3))'
w = u + v
x = 0.5
y = 1.0
z = -2.0
k = x*u + y*v + z*w
% how to access to vector's components
k(1)
k(2)
% the same as k(2)
k(2,1)
% access error
k(1,2)