Given the resultants defined by the expressions (2.1.4) and (2.1.5), the condition of static equilibrium for a continuous body is expressed by the following equations
These conditions, for the assumption of continuity, do not apply only to the body \(\body \) under investigation but also to any subset extracted from the main body.
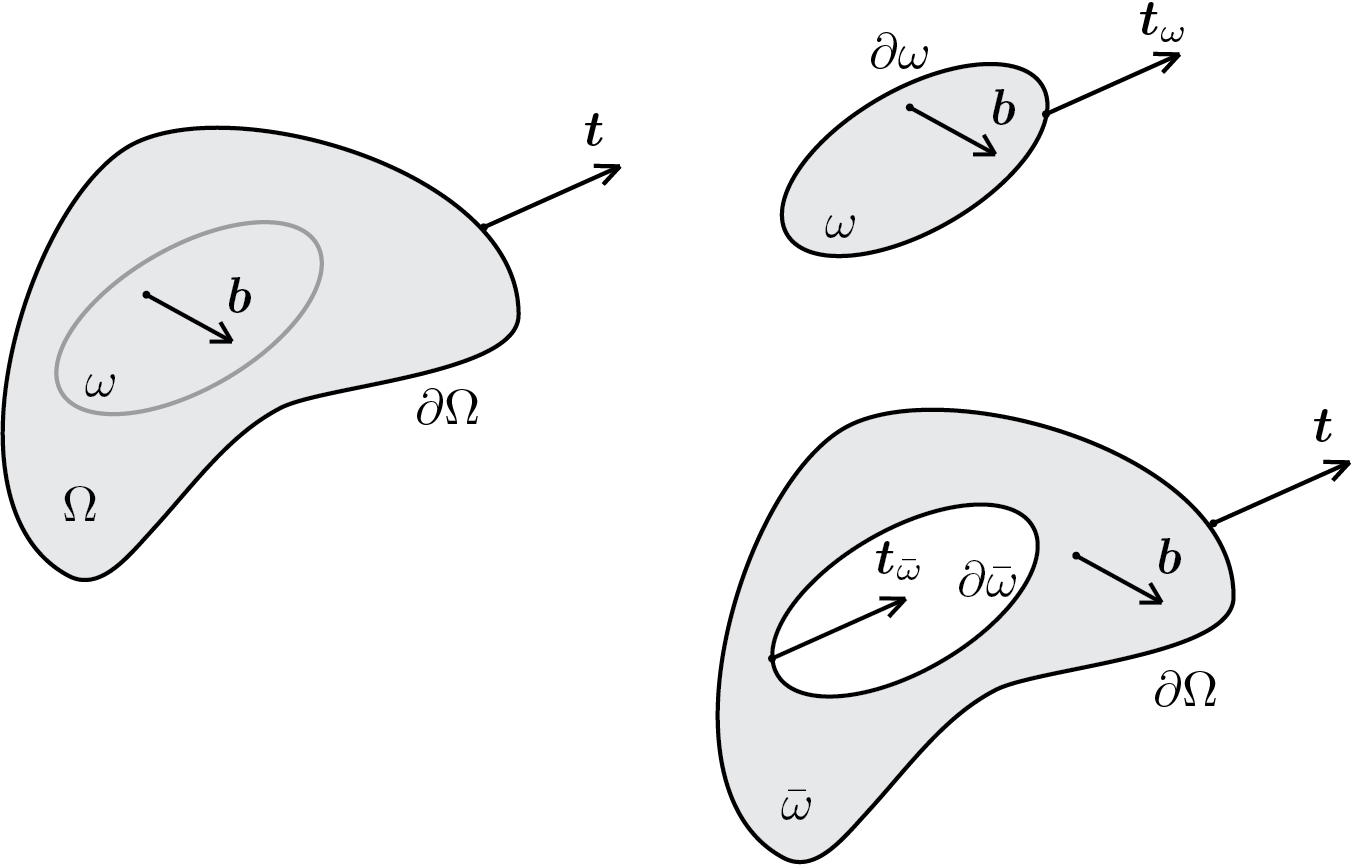
This separation, typical of solid mechanics, is performed using imaginary surfaces used to cut the starting body. In particular, see the figure above, for the two body parts thus obtained the following pairs of equations can be written
where \(\vec{t}_{\omega}\) is the action exerted on \(\omega\) by the other part of the domain \(\bar{\omega}\) and, on the contrary, \(\vec{t}_{\bar{\omega}}\) is the action exerted on \(\bar{\omega}\) by the other resulting part \(\omega\text{.}\)