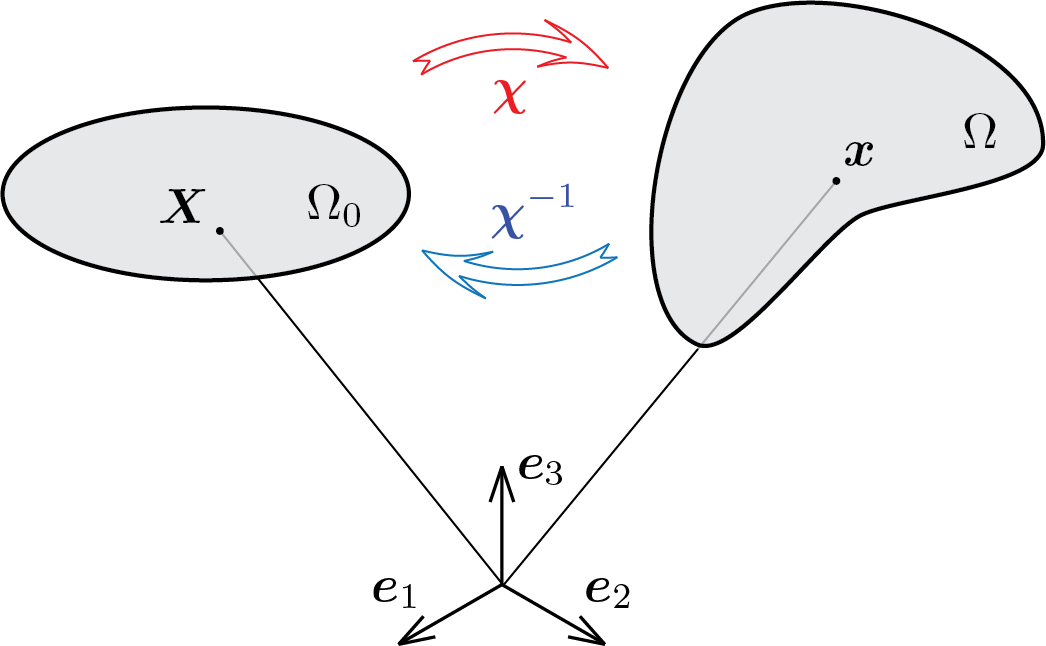
valid \(\forall\vec{X} \in \body_0\text{.}\)\(\vec{\chi}\) is a vector function which, given a position \(\vec{X}\) relative to the reference configuration, provides the new position \(\vec{x}\) relative to the current configuration. The dependence between \(\vec{x}\) and \(\vec{X}\) is sometimes indicated shortly as follows
where the symbol \(\vec{\chi}^{-1}\) indicates the inverse motion that associates the current position \(\vec{x}\) with the position \(\vec{X}\) in the reference configuration.
In general the motion \(\vec{\chi}\) of a body will change the position, orientation and shape of the body. A body capable of modifying its shape will therefore be called deformable.
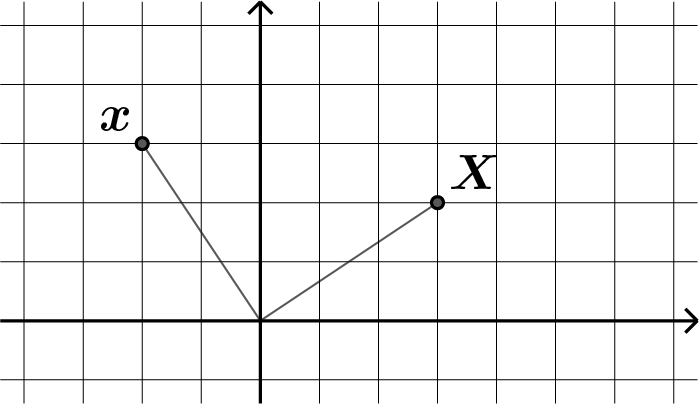
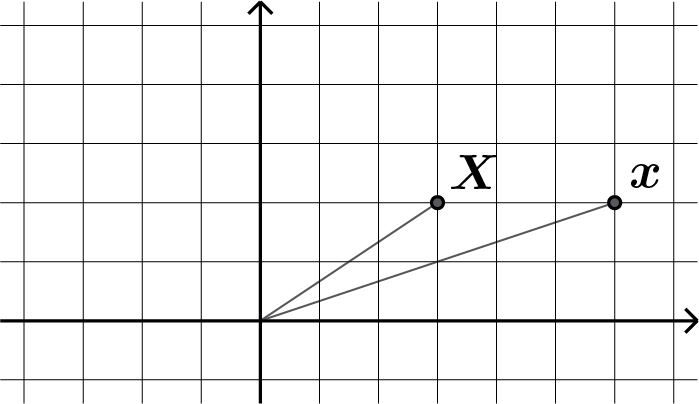
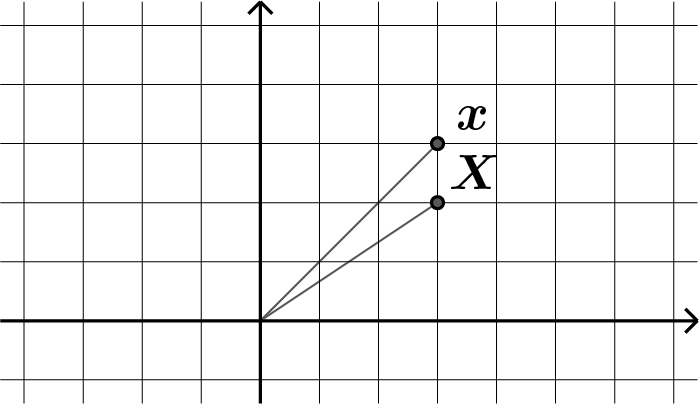
As shown in previous video, in the case in which the transformation \(\vec{\chi}\) is linear its action on the vector \(\vec{X}\) can be transferred through the matrix \(\mat{M_{\chi}}\) defined as follows
where \(\func{\vec{\chi}}{\vec{e}_1}\text{,}\)\(\func{\vec{\chi}}{\vec{e}_2}\) and \(\func{\vec{\chi}}{\vec{e}_3}\) are the vectors obtained by the application of the trasformation \(\vec{\chi}\) to the vectors forming the reference basis. Therefore the transformation of any vector \(\vec{X}\) can be obtained in an equivalent way by applying the matrix \(\mat{M_{\chi}}\text{:}\)
It is important to underline again that it is possible to identify the matrix \(\mat{M_{\chi}}\) only in the case of linear transformation. Furthermore, the reverse is also true, i.e. the existence of a matrix \(\mat{M_{\chi}}\) usable to represent a transformation implies the linearity of the transformation.