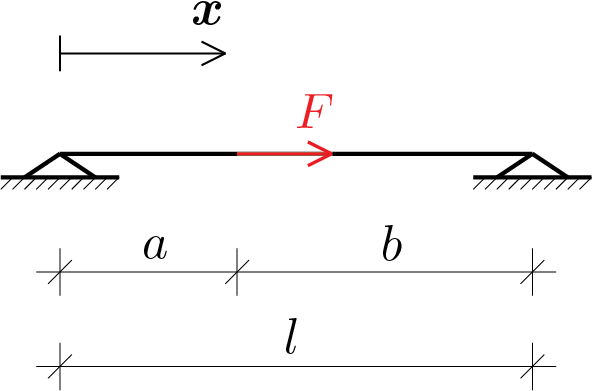
The assigned scheme differs from the scheme considered in the previous section because the elastic solution to be evaluated does not have a single valid expression on the whole domain of the beam. The force applied inside the extension of the beam determines a discontinuity in the solution and therefore the need to study the problem on the two subdomains, \(0 \leq x \leq a \) and \(a \leq x \leq l \text{,}\) highlighted in the figure. We then proceed by evaluating two different elastic solutions but connected by the necessary boundary conditions at the interface.
By applying the equilibrium equation (3.5.21) to the two subdomains the following equations are obtained
\begin{align*}
\amp EA\,\frac{d^2u_a}{dx^2} = 0\,,\quad 0 \leq x \leq a\,,\\
\amp EA\,\frac{d^2u_b}{dx^2} = 0\,,\quad a \leq x \leq l\,.
\end{align*}
We thus obtain a system of 2 differential equations where the unknowns, \(u_a \) and \(u_b \text{,}\) are uncoupled. Unknowns that still interact in the boundary conditions. In particular, these conditions are expressed by the following equations
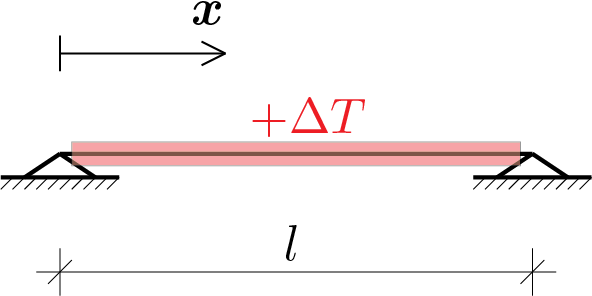
The presence of the increase in temperature determines an elongation of the beam equal to
\begin{equation*}
\Delta l_T = \alpha \Delta T \,l\,,
\end{equation*}
where \(\alpha \) represents the thermal expansion coefficient of the material. This elongation is however prevented by the presence of the constraints therefore the beam will also be subjected to an axial force calculable by the following equation
\begin{equation*}
N = - EA \,\alpha \Delta T\,,
\end{equation*}
solution showing the state of compression determined by the elongation which is not allowed. The solution in terms of displacement is identically zero along its entire beam length.