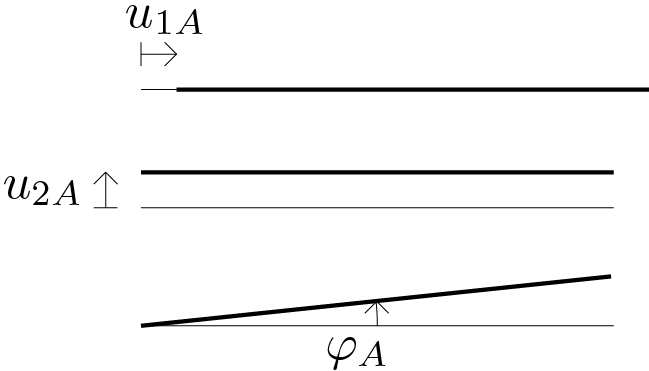
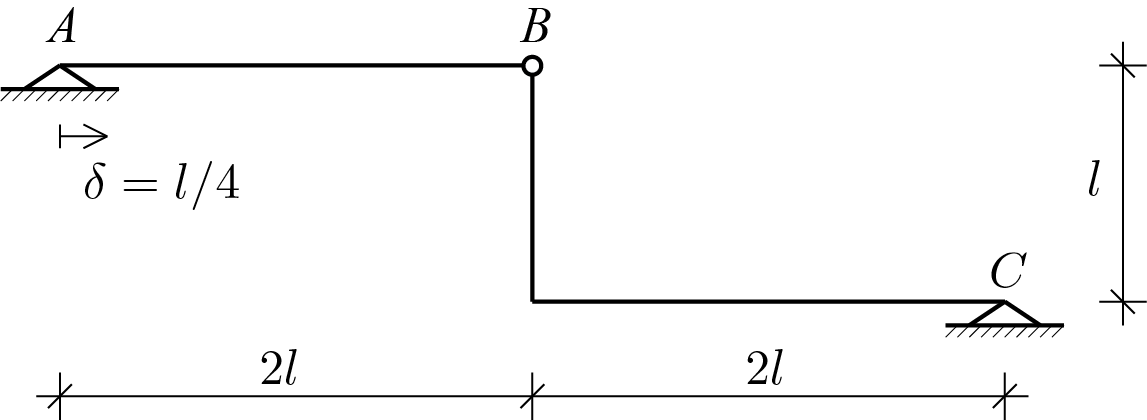
Per l’unico corpo rigido in esame si scelga come polo il punto \(A\text{,}\) pertanto i 3 parametri lagrangiani (\(n=3\)) utilizzabili per la descrizione cinematica del sistema sono:
Prima di procedere con la soluzione del sistema è possibile classificare il sistema calcolando il rango della matrice cinematica mediante le seguenti istruzioni MATLAB®. Listing4.4.3.
Dal momento che il \(\textrm{min}(m,n) = 3 == \textrm{rango}\mat{A}\) e \(n == m\) allora il sistema è cinematicamente determinato. La soluzione del sistema lineare fornisce infine i valori assunti dai parametri lagrangiani \(u_{1A}\text{,}\)\(u_{2A}\) e \(\varphi_{A}\) i quali in questo caso sono identicamente nulli.
Pertanto sul sistema di equazioni da analizzare l’unico effetto è costituito solo dalla modifica del vettore dei termini noti e non si ha nessun effetto sulla classificazione del sistema che resta sempre cinematicamente determinato (la matrice \(A\) non è cambiata!). Pertanto il sistema di equazioni diventa
Lo schema proposto non presenta nessuna novità particolare rispetto allo schema precedente, pertanto si presenta una sua soluzione sulla base delle seguenti istruzioni MATLAB®.
$ % campo di spostamento generico nel piano
rigidDispl = ...
@(u0, phi0, X0, X)...
[u0(1)-phi0*(X(2)-X0(2));...
u0(2)+phi0*(X(1)-X0(1))];
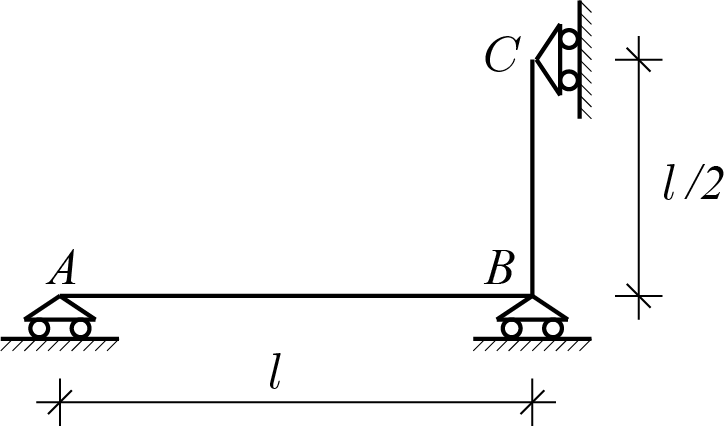
% descrizione geometrica della trave
syms l;
A = [0; 0];
B = [l; 0];
C = [l; l/2];
% campo di spostamento assumendo come polo il punto A
POLO = A;
syms phiA;
phi0 = phiA;
u0 = sym('uA', [2 1]);
uA = rigidDispl(u0, phi0, POLO, A);
uB = rigidDispl(u0, phi0, POLO, B);
uC = rigidDispl(u0, phi0, POLO, C);
% equazioni di vincolo
eqns = [
uA(2) == 0,
uB(2) == 0,
uC(1) == 0
];
% matrice cinematica e vettore degli spostamenti assegnati
[A,d] = equationsToMatrix(eqns, [uA(1), uA(2), phiA]);
% gradi di libertà, n
% gradi di vincolo, m
[m,n] = size(A);
% calcolo del rango di A
r = rank(A);
% se il sistema è cinematicamente determinato si calcola la soluzione
if and(r == min(m,n), m == n)
x = linsolve(A,d);
end
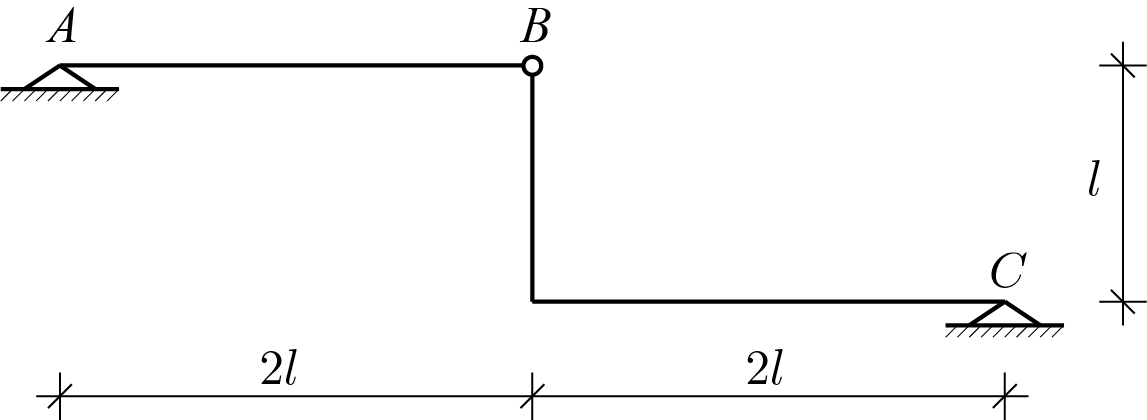
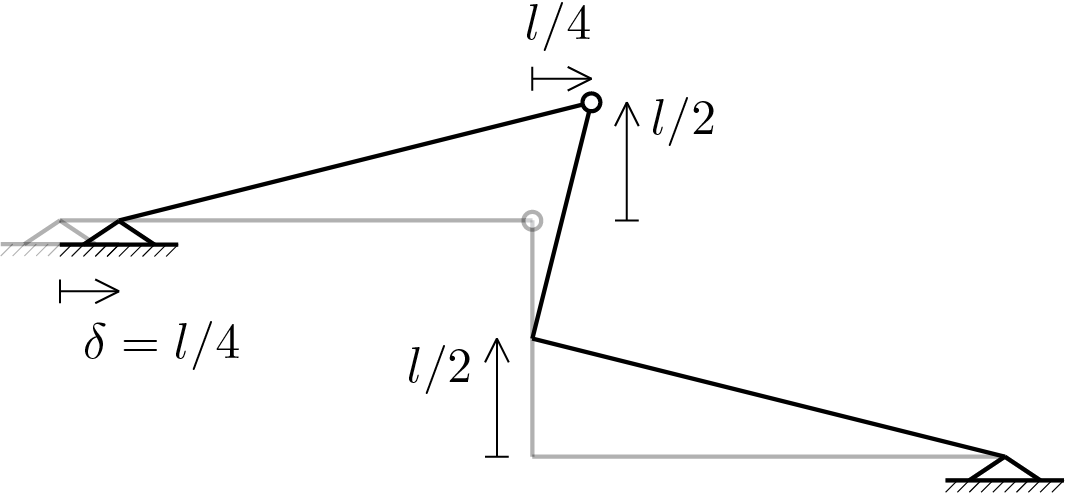
I corpi rigidi in esame sono due: per il corpo \(AB\) si sceglie come polo il punto \(A\) e per il secondo corpo si sceglie il punto \(B'\text{.}\) Pertanto i 6 parametri lagrangiani (\(n=6\)) utilizzabili per la descrizione cinematica del sistema sono:
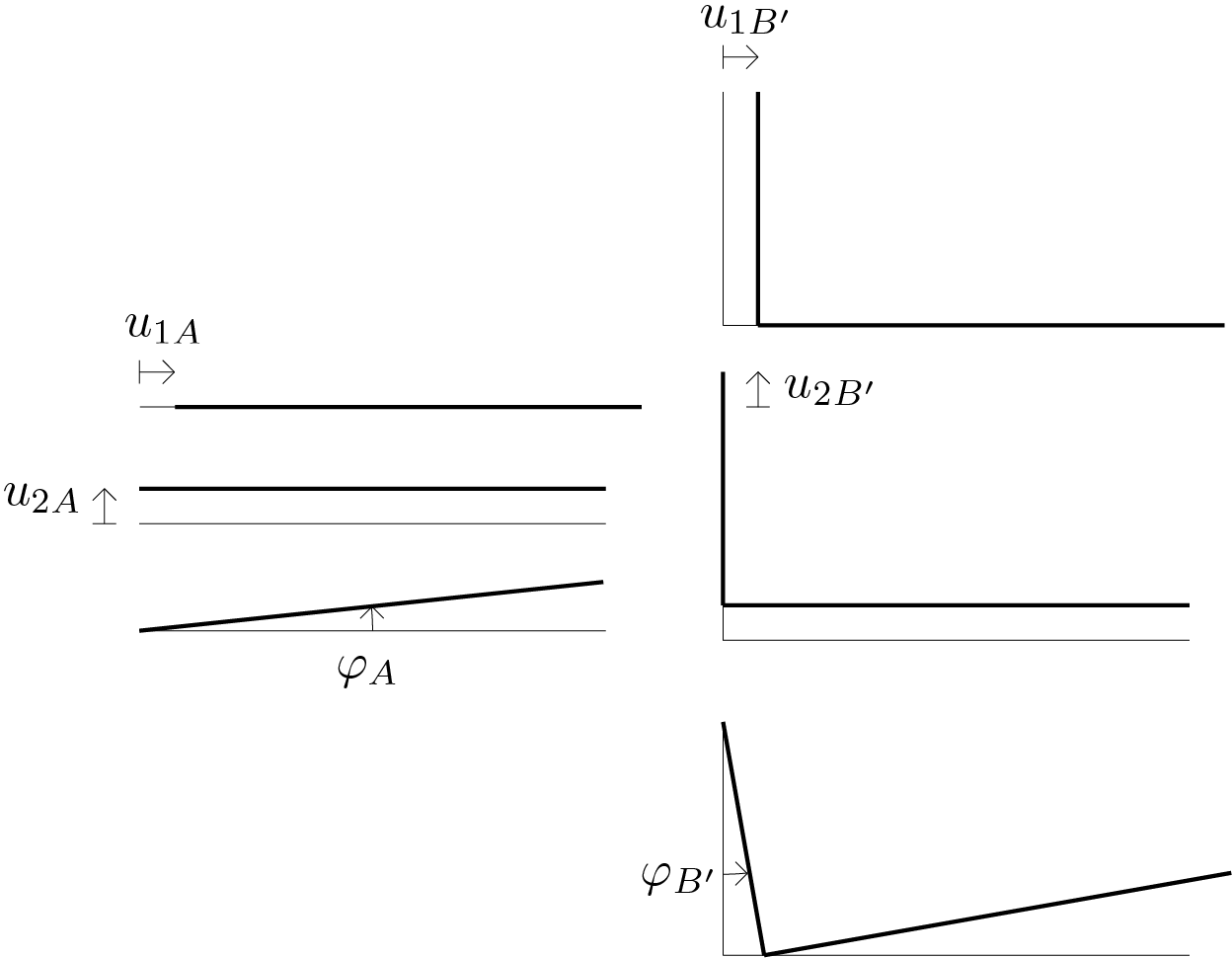
Dal momento che il \(\textrm{min}(m,n) = 6 == \textrm{rango}\mat{A}\) e \(n == m\) allora il sistema è cinematicamente determinato. La soluzione del sistema lineare fornisce i valori assunti dai parametri lagrangiani \(u_{1A}\text{,}\)\(u_{2A}\text{,}\)\(\varphi_{A}\text{,}\)\(u_{1B'}\text{,}\)\(u_{2B'}\text{,}\)\(\varphi_{B'}\text{.}\)
Anche in questo caso la soluzione di un sistema cinematicamente determinato rispetto ad un vettore dei termini noti identicamente nullo fornisce ancora la soluzione banale.
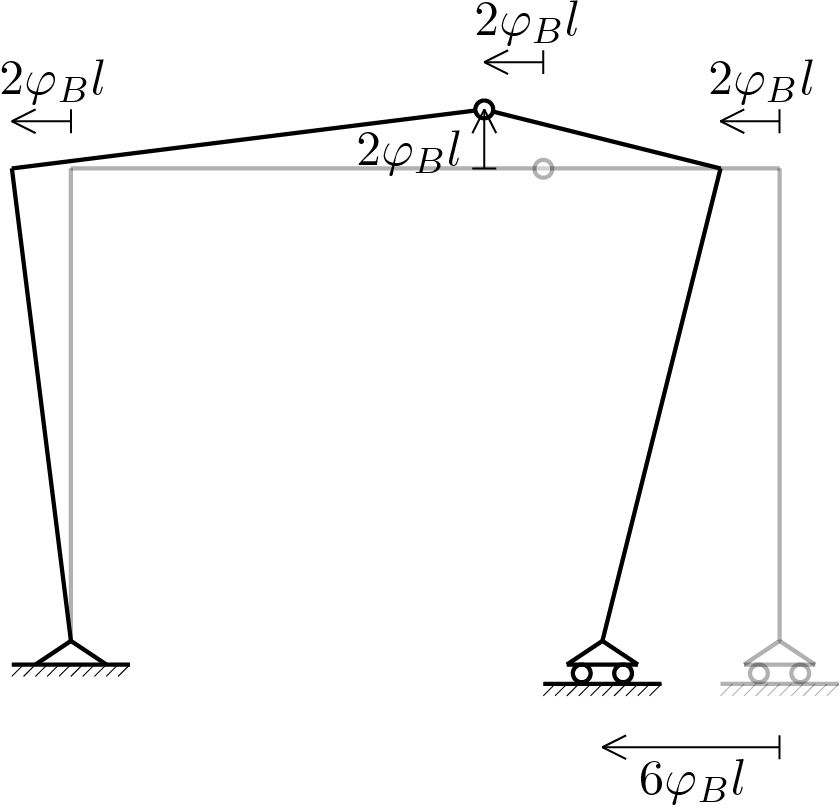
La rappresentazione grafica del campo di spostamento si ottiene valutando lo spostamento dei punti posti alle estremità dei tratti rettilinei ottenendo quanto segue.
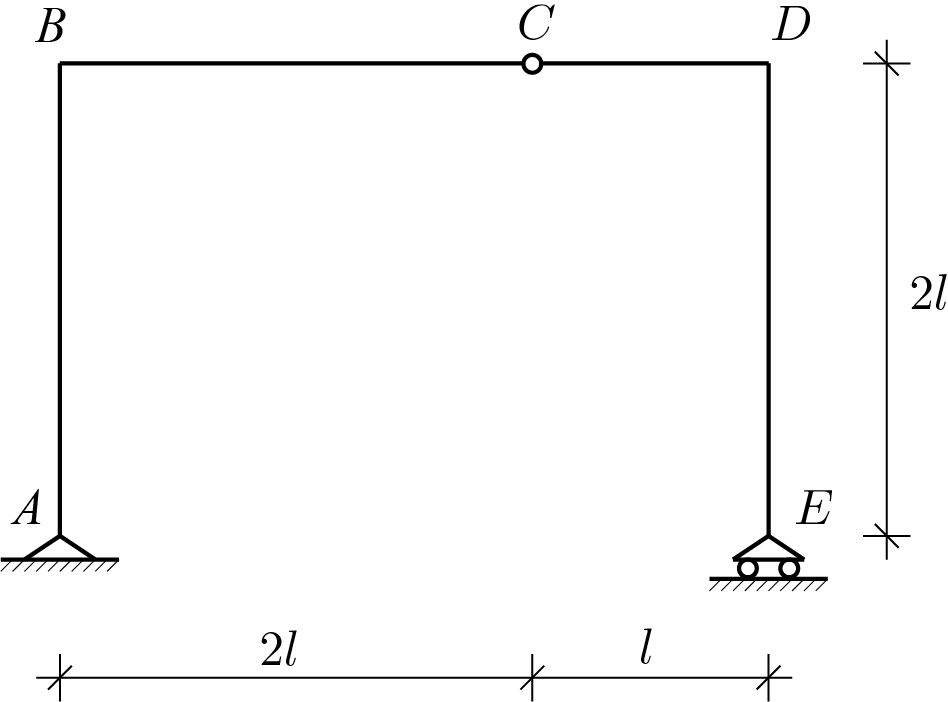
Utilizzando sempre il modello di moto piano rappresentato dall’equazione (4.1.5) le condizioni di vincolo possono essere espresse rispetto alle coordinate lagrangiane scelte ottenendo quanto segue,
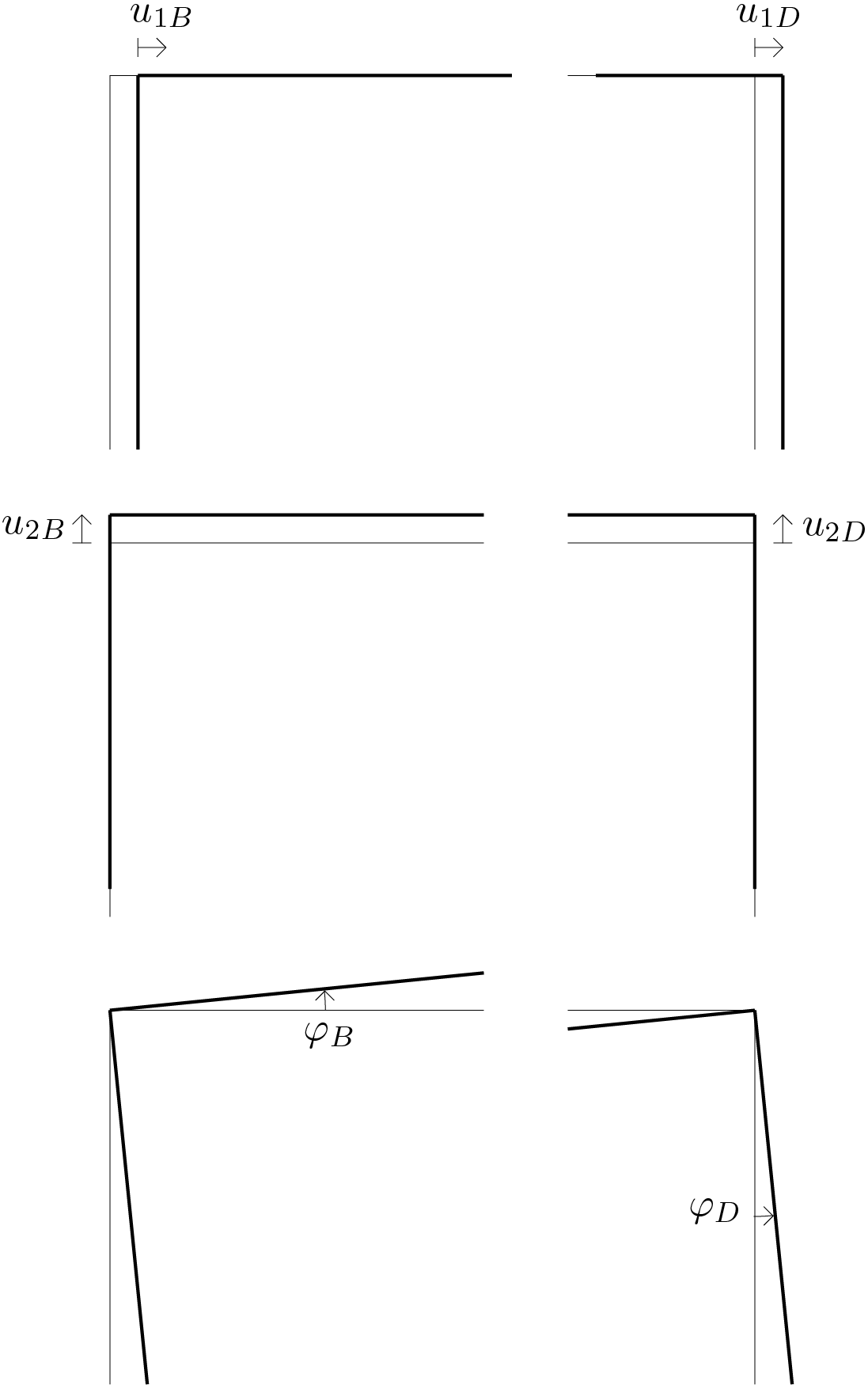
In questo caso il \(\textrm{rango}\mat{A} == \textrm{min}(m,n) = 5\) e \(m < n\) pertanto il sistema è labile e caratterizzato da infinite soluzioni. Per descrivere tutte le soluzioni possibili si scelga come parametro la rotazione \(\varphi_{B}\) che viene eliminata dal gruppo delle incognite da calcolare. In tal modo il sistema può essere riscritto come segue