Di equazioni di equilibrio si è già parlato nel Chapter 2 dedicato ai corpi continui. Si potrebbe quindi procedere particolarizzando le equazioni (2.2.1) e (2.2.2) al caso di sistemi di corpi soggetti a forze di tipo puntuale. Si preferisce invece ricavare le equazioni di equilibrio in maniera autonoma attraverso l’applicazione del principio dei lavori virtuali già discusso per i corpi continui nella Section 2.5.
Subsection5.1.1condizioni di equilibrio statico per un sistema di punti
Si consideri un sistema costituito da \(N\) punti materiali. Applicando la prima legge di Newton il sistema di punti manterrà il proprio stato di quiete se:
Subsection5.1.2forma scalare delle equazioni di equilibrio
Si consideri per ciascun punto del sistema uno spostamento arbitrario \(\delta\vec{u}_i\text{,}\) e si sommi il prodotto scalare di ogni forza \(\vec{F}_i\) per il corrispondente spostamento introdotto. In virtù della (5.1.1) è possibile formulare la seguente equazione scalare:
Subsection5.1.3introduzione della cinematica di corpo rigido
Se a questo punto si assume che il sistema di punti in esame siano punti appartenenti ad un corpo rigido allora è possibile esprimere il campo di spostamenti virtuali, si veda l’equazione (4.1.6), nel modo seguente:
Il soddisfacimento di quest’ultima condizione scalare per qualsiasi \(\delta\vec{u}_o\) e qualsiasi \(\delta\varphi\vec{w}\) richiede il soddisfacimento delle seguenti equazioni vettoriali.
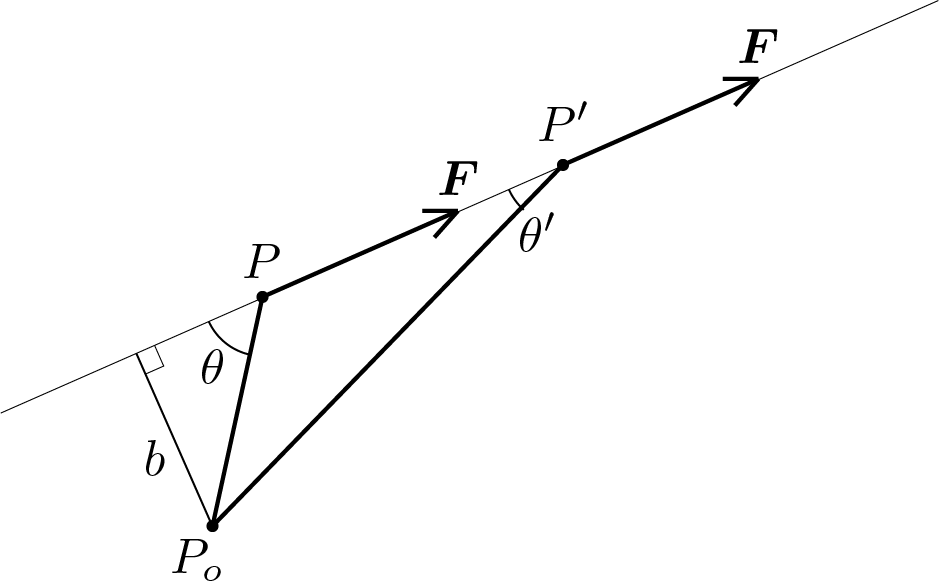
Data una forza \(\vec{F}\) applicata al punto di coordinate \(\vec{X}\) e dato un polo individuato dalle coordinate \(\vec{X}_o\text{,}\) è possibile valutare il momento di \(\vec{F}\) rispetto al polo scelto calcolando il seguente prodotto vettoriale
Quindi \(b\) è la distanza fra il polo \(P_o\) e la retta di applicazione della forza \(\vec{F}\text{.}\) Si osserva anche che se \(\theta=0\) oppure \(\theta=\pi\text{,}\) ovvero i vettori \(\left( \vec{X} - \vec{X}_o\right)\) e \(\vec{F}\) sono paralleli, il momento \(\calvec{M}_o\) è nullo.