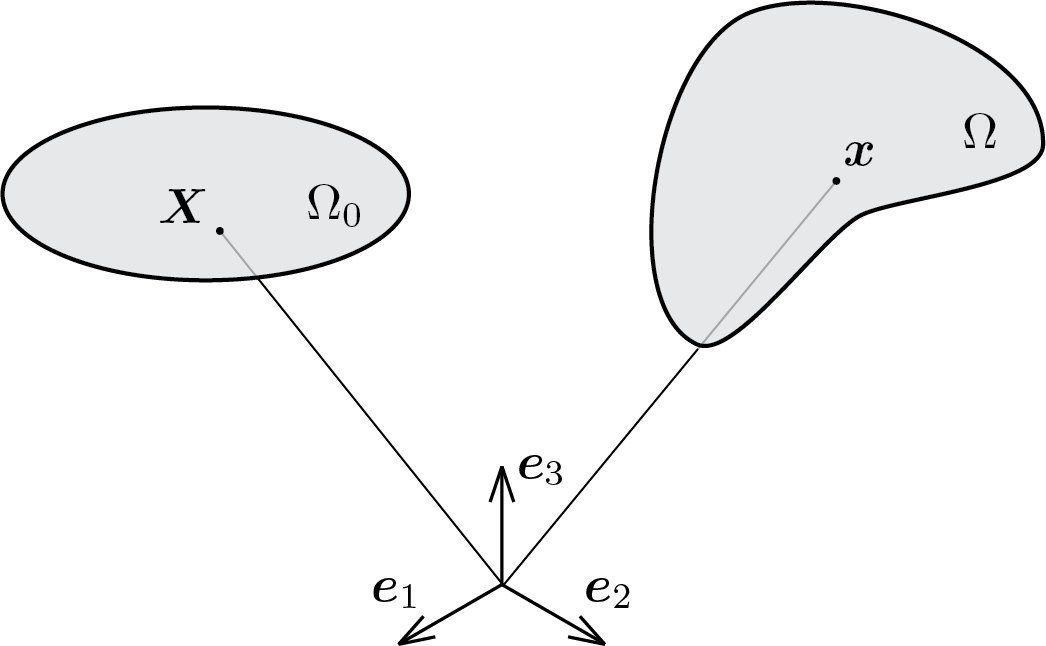
L’oggetto dell’analisi cinematica è un corpo continuo che sarà denominato con il simbolo \(\body\text{.}\) Ciascun punto del corpo occupa nello spazio una posizione che, fissata una terna ortonormale di riferimento \(\vec{e}_a\) (\(a=1,2,3\)), è individuata da un vettore. A tal riguardo parleremo di due configurazioni:
la configurazione di riferimento\(\body_0\text{,}\) ovvero l’insieme delle posizioni \(\vec{X}\) occupate dai punti del corpo prima del moto;
$ u = [1 2 3]
v = 4:6
w = u + v
x = 0.5
y = 1.0
z = -2.0
k = x*u + y*v + z*w
% accesso alle singole componenti
u(1)
u(2)
% equivalente a u(2)
u(1,2)
% errore di accesso
u(2,1)
$ u = [1; 2; 3]
v = (linspace(4,6,3))'
w = u + v
x = 0.5
y = 1.0
z = -2.0
k = x*u + y*v + z*w
% accesso alle singole componenti
k(1)
k(2)
% equivalente a k(2)
k(2,1)
% errore di accesso
k(1,2)