La possibilità che una data trasformazione lineare possa essere il risultato della composizione di più trasformazioni lineari e la considerazione fisica che il moto di un corpo si compone di trasformazioni elementari come la rotazione e la deformazione pura, portano al seguente risultato fondamentale e formalizzabile in termini di teorema.
Dato il gradiente della deformazione \(\func{\tens{F}}{\vec{X}}\text{,}\) in ogni punto del corpo soggetto al moto esiste un’unica decomposizione polare definita come segue
\(\tens{U}\) e \(\tens{V}\) sono, rispettivamente, il tensore destro di deformazione e il tensore sinistro di deformazione. Tali tensori sono unici, definiti positivi e simmetrici. Il fatto che \(\tens{U}\) e \(\tens{V}\) siano definiti positivi impone che per qualsiasi vettore \(\vec{v} \neq \vec0\) sia soddisfatta la proprietà
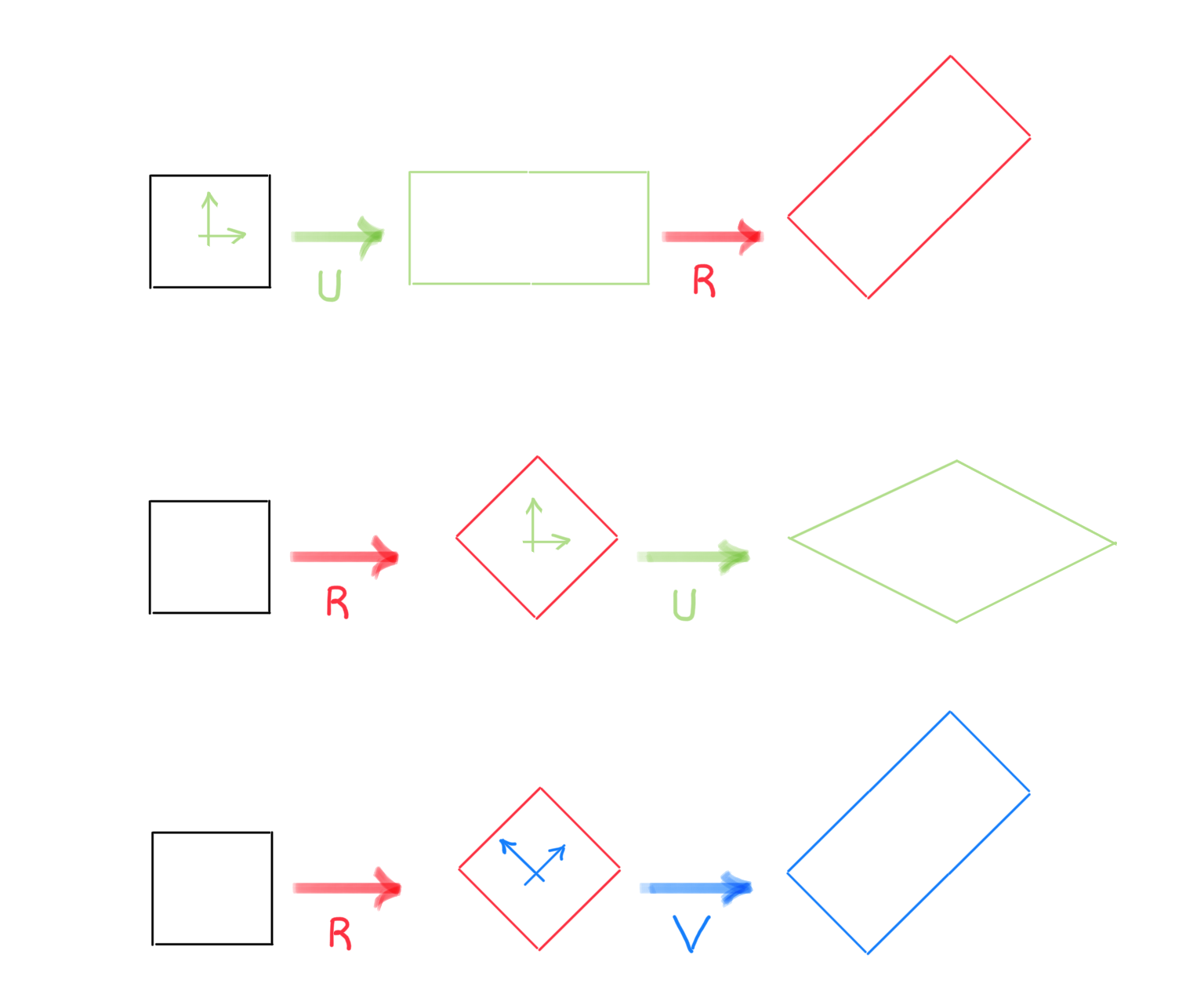
In particolare si illustra il caso in cui il tensore destro della deformazione, \(\tens{U}\text{,}\) produce soltanto un allungamento in direzione orizzonale e, a seguire, il tensore \(\tens{R}\) produce una rotazione di 45\(^o\text{.}\) È evidente che nel caso in cui si applichi prima la rotazione, seconda e terza sequenza di trasformazioni in figura, il tensore della deformazione non può essere lo stesso ma deve essere diverso e pari la tensore sinistro \(\tens{V}\) il quale consente di ottenere la stessa configurazione finale.
Il teorema di decomposizione polare coglie quindi le trasformazioni elementari, rotazione e deformazione pura, che compongono \(\tens{F}\) e mette in evidenza la non commutatività delle due trasformazioni. Inoltre se \(\tens{R}=\tens{I}\) e quindi \(\tens{F}=\tens{U}=\tens{V}\) la trasformazione, nel punto considerato, è una deformazione pura. Al contrario, \(\tens{U}=\tens{I}=\tens{V}\) e quindi \(\tens{F}=\tens{R}\) la trasformazione, nel punto considerato, è una rotazione rigida.
Abbiamo già più volte incontrato il tensore 2D relativo ad una rotazione in senso antiorario di \(90^o\) che in termini matriciali ha la seguente espressione
Le proprietà elencate non sono specifiche del particolare tensore considerato ma sono soddisfatte da tutti i tensori di rotazione, qualsiasi sia l’entità dell’angolo di rotazione. Al fine di verificare ciò, si consideri la trasformazione lineare che ruota di un generico angolo \(\theta\) un vettore assegnato \(\vec{X}\text{.}\)
relazione che conferma il fatto che il cambio di volume non può che essere legato unicamente alla parte \(\tens{U}\) della trasformazione. È anche facile verificare che
allora il tensore è definito positivo. Da un punto di vista geometrico tale condizione è facilmente interpretabile come segue: ogni volta che si applica la trasformazione lineare \(\tens{T}\) a qualsiasi vettore non nullo, si ottiene un vettore \(\tens{T}\vec{v}\) che forma con il vettore di partenza \(\vec{v}\) un angolo inferiore a \(\pi/2\text{,}\) condizione che ha comunque, molto spesso, un significato fisico ben preciso.