Section5.6applicazione dell’analisi statica ai sistemi di corpi
Subsection5.6.1mensola
Si consideri una semplice trave incastrata ad un estremità e soggetta ad una forza verticale all’estremo libero. Nella figura successiva viene illustrato lo schema di partenza e il diagramma di corpo libero ottenuto rimuovendo l’incastro ed applicando le relative componenti di reazione vincolare (\(m=3\)).
L’analisi coinvolge solo un corpo rigido, pertanto è possibile scrivere 3 equazioni di equilibrio (\(n=3\)) che, assumendo come polo per l’equilibrio alla rotazione l’estremo \(A\) della trave, sono esprimibili come segue
\begin{align*}
H_A \amp = 0\,,\\
V_A - F \amp = 0\,,\\
\mathcal{M}_{A} - F l \amp = 0\,.
\end{align*}
Condizioni esprimibili in forma matriciale ottenendo
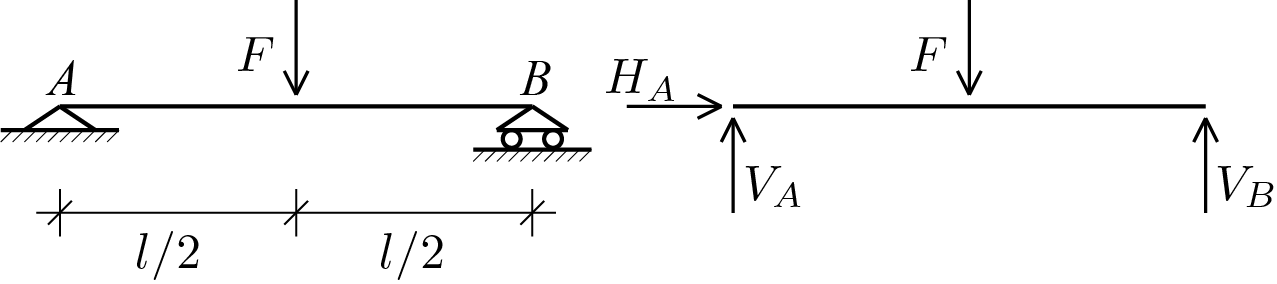
Si consideri una trave vincolata nella maniera indicata in figura e soggetta ad una forza verticale in mezzeria. La stessa figura riporta anche il diagramma di corpo libero ottenuto rimuovendo la cerniera e il carrello facendo seguire l’applicazione delle relative componenti di reazione vincolare (\(m=3\)).
La presenza di un solo corpo rigido determina la scrittura di 3 equazioni di equilibrio (\(n=3\)) per le quali si assume l’estremo \(A\) come polo per l’equilibrio alla rotazione:
\begin{align*}
H_A \amp = 0\,,\\
V_A + V_B - F \amp = 0\,,\\
V_{B} l - F l/2 \amp = 0\,.
\end{align*}
Anche in questo caso la semplice ispezione della matrice statica consente di stabilire l’isostaticità del sistema. Il calcolo delle componenti di reazione vincolare fornisce:
$ % vettore delle risultanti =
% [orizzontale; verticale; momento]
R = zeros(3,1);
% funzione per il calcolo del momento
momento = @(X0, X, Carico)...
-Carico(1)*(X(2)-X0(2))+Carico(2)*(X(1)-X0(1));
% coordinate dei punti sui quali sono applicati i carichi
syms L;
A = [0; 0];
B = [L; 0];
C = [L/2; 0];
% scelta del polo
POLO = A;
% per ogni punto si assegna il vettore Carico = [F1; F2; M]
% e si sommano i contributi alla risultante
syms HA VA;
CaricoA = [HA; VA; 0];
R = R + CaricoA;
R(3) = R(3) + momento(POLO, A, CaricoA);
R
syms VB;
CaricoB = [0; VB; 0];
R = R + CaricoB;
R(3) = R(3) + momento(POLO, B, CaricoB);
R
syms F;
CaricoC = [0; -F; 0];
R = R + CaricoC;
R(3) = R(3) + momento(POLO, C, CaricoC);
R
% equazioni di equilibrio
eqns = [
R(1) ==0,
R(2) == 0,
R(3)==0
];
% matrice statica e vettore dei carichi assegnati
[B,b] = equationsToMatrix(eqns, [HA, VA, VB]);
% gradi di libertà, n
% gradi di vincolo, m
[n,m] = size(B);
% calcolo del rango di B
r = rank(B);
% se il sistema è staticamente determinato si calcola la soluzione
if and(r == min(m,n), m == n)
x = linsolve(B,b);
end
HA = x(1)
VA = x(2)
VB = x(3)
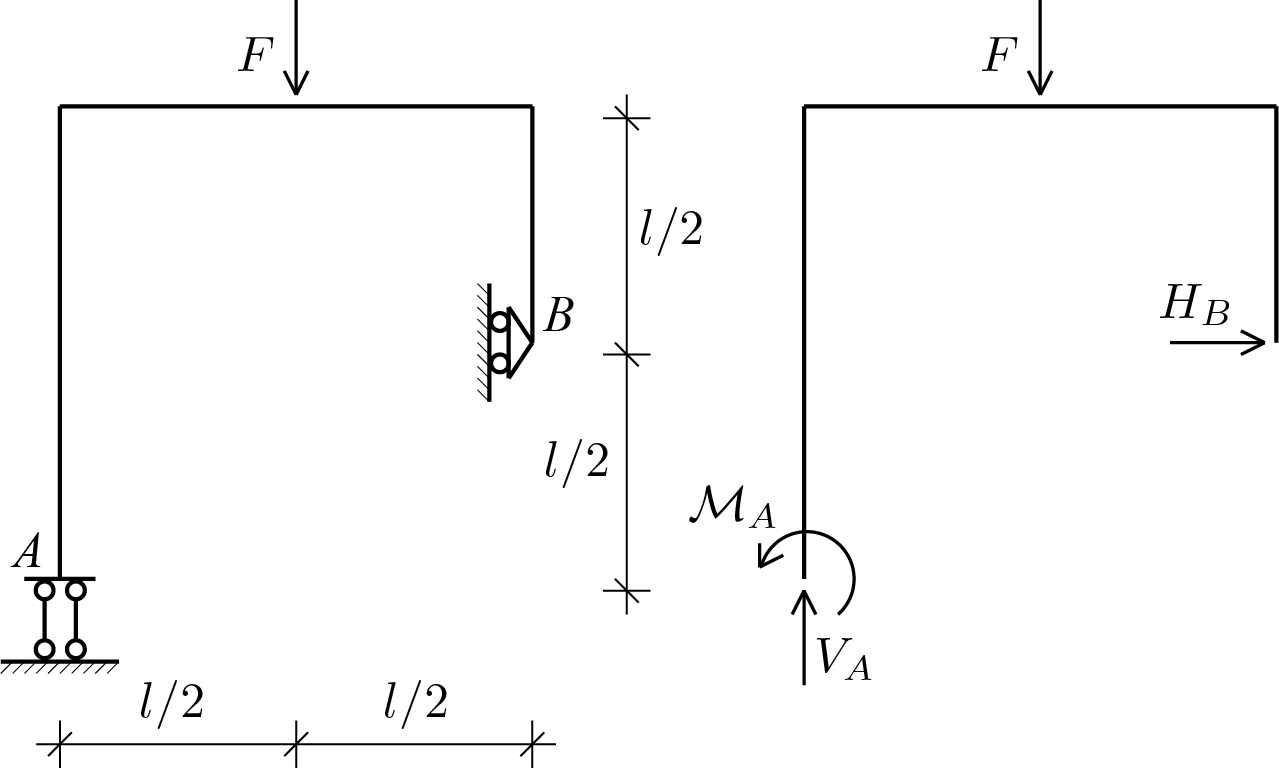
Si consideri il seguente portale soggetto ad una forza verticale applicata nella mezzeria del traverso. I vincoli (\(m=3\)) sono applicati al piede dei ritti e la loro rimozione e la successiva applicazione delle componenti di reazione vincolare conduce al diagramma di corpo libero riportato in figura insieme allo schema assegnato.
$ % vettore delle risultanti =
% [orizzontale; verticale; momento]
R = zeros(3,1);
% funzione per il calcolo del momento
momento = @(X0, X, Carico)...
-Carico(1)*(X(2)-X0(2))+Carico(2)*(X(1)-X0(1));
% coordinate dei punti sui quali sono applicati i carichi
syms L;
A = [0; 0];
B = [L; L/2];
C = [L/2; L];
% scelta del polo
POLO = C;
% per ogni punto si assegna il vettore Carico = [F1; F2; M]
% e si sommano i contributi alla risultante
syms VA MA;
CaricoA = [0; VA; MA];
R = R + CaricoA;
R(3) = R(3) + momento(POLO, A, CaricoA);
R
syms HB;
CaricoB = [HB; 0; 0];
R = R + CaricoB;
R(3) = R(3) + momento(POLO, B, CaricoB);
R
syms F;
CaricoC = [0; -F; 0];
R = R + CaricoC;
R(3) = R(3) + momento(POLO, C, CaricoC);
R
% equazioni di equilibrio
eqns = [
R(1) ==0,
R(2) == 0,
R(3)==0
];
% matrice statica e vettore dei carichi assegnati
[B,b] = equationsToMatrix(eqns, [VA, MA, HB]);
% gradi di libertà, n
% gradi di vincolo, m
[n,m] = size(B);
% calcolo del rango di B
r = rank(B);
% se il sistema è staticamente determinato si calcola la soluzione
if and(r == min(m,n), m == n)
x = linsolve(B,b);
end
VA = x(1)
MA = x(2)
HB = x(3)
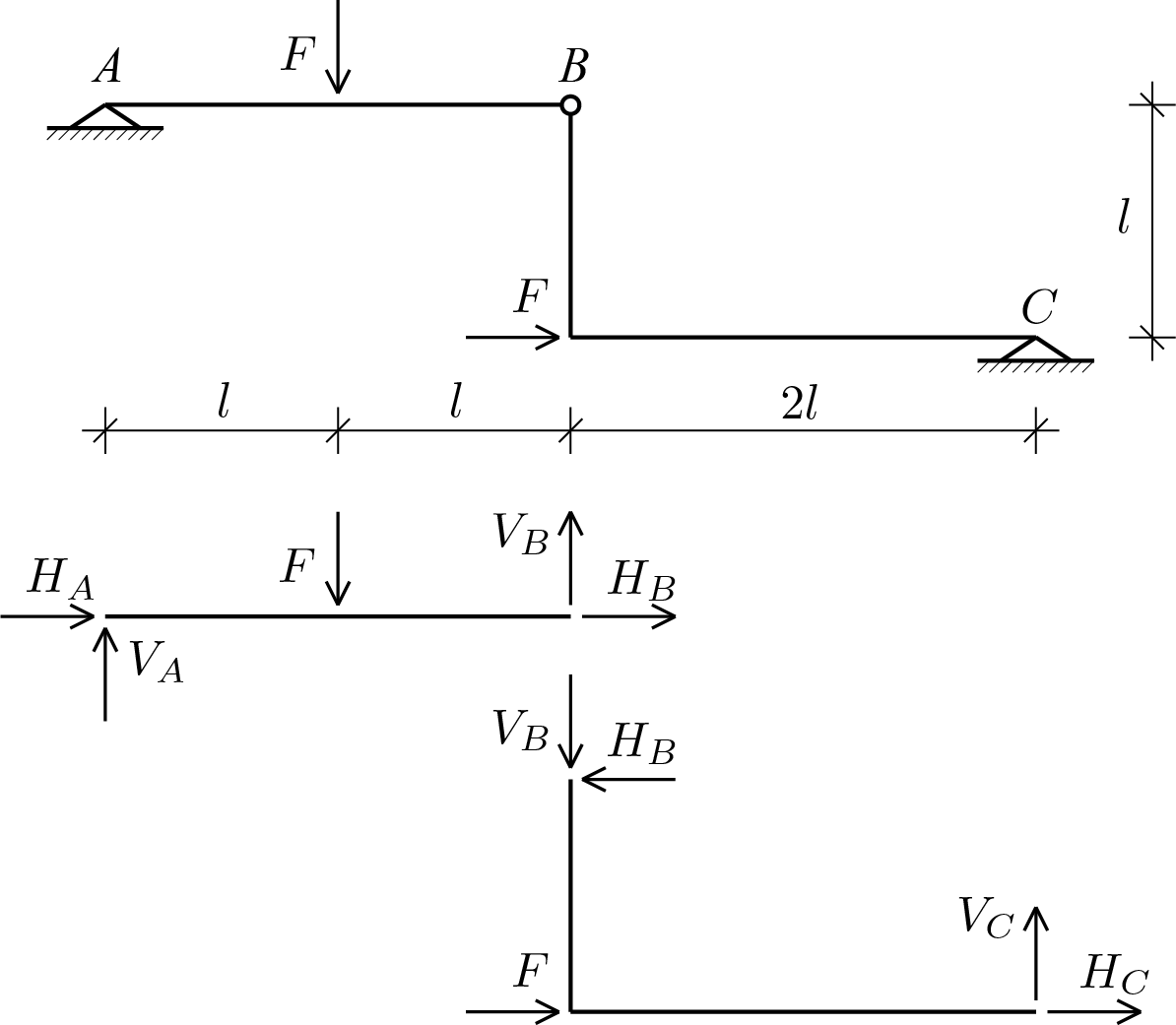
Si consideri il seguente sistema costituito da due corpi connessi mediante una cerniera interna. La rimozione di tutti i gradi di vincolo (\(m=6\)) e la successiva applicazione delle componenti di reazione vincolare conduce al diagramma di corpo libero riportato in figura insieme allo schema assegnato.
Il sistema è costituito da due corpi (\(n=6\)), consentendo la scrittura di due gruppi di equazioni: le equazioni di equilibrio per il corpo \(AB\) (polo in \(A\))
\begin{align*}
H_A + H_B \amp = 0\,,\\
V_A + V_B - F \amp = 0\,,\\
V_{B} 2l - F l \amp = 0\,,
\end{align*}
Il calcolo fornisce un rango pari a \(r=6\) che verifica la condizione \(\text{min}(n, m)=6\text{.}\) Essendo \(m==n\) il sistema è isostatico. La soluzione del sistema lineare calcolabile con MATLAB®