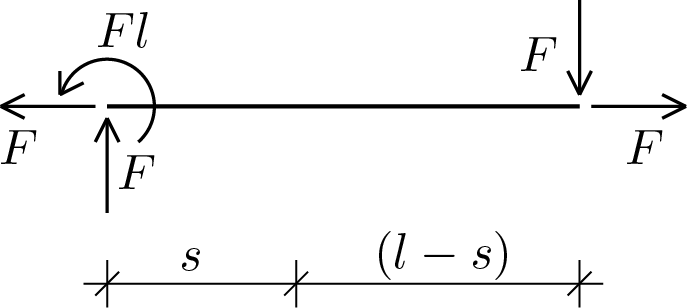
Lo stato di sforzo interno dei solidi mono-dimensionali, o travi, viene caratterizzato valutando in ogni punto le componenti della sollecitazione. Nel caso piano le componenti di sollecitazione sono tre: sforzo normale (\(N\)), taglio (\(T\)) e momento flettente (\(M\)). Al fine di arrivare in maniera semmplice ad una definizione delle sollecitazioni, si consideri il seguente diagramma di corpo libero relativo ad un sistema equilibrato di forze.
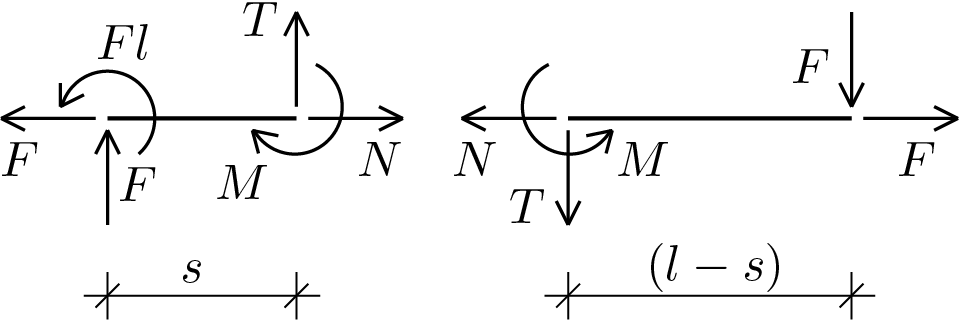
dove si è postulato che le due parti si scambino, attraverso la sezione di separazione, delle azioni uguali ed opposte. Tali azioni dovranno essere comunque tali da soddisfare le equazioni di equilibrio su ciascuna parte ottenuta. In particolare, se si considera il tratto di lunghezza \(s\) si ottengono le seguenti equazioni (polo per l’equilibrio alla rotazione posto nell’ascissa \(s\)):
\begin{align*}
N - F \amp = 0\,,\\
T + F \amp = 0\,,\\
-M - F s + Fl \amp = 0\,.
\end{align*}
Sistema che fornisce la seguente soluzione per le componenti, incognite, di sollecitazione
\begin{align*}
N \amp= F\,,\\
T \amp=-F \,,\\
M \amp= F(l - s)\,.
\end{align*}
Lo stesso risultato si otterrebbe applicando le equazioni di equilibrio al tratto di lunghezza \((l-s)\text{.}\)
Il procedimento di separazione effetuato può anche essere inteso come la rimozione del vincolo di continuità nel punto \(s\) e l’applicazione delle "reazioni vincolari" associate al vincolo, di grado 3, rimosso.
La singola operazione di sezionamento deve consentire di ottenere due corpi liberi distinti. Se a tal fine fosse neccessario effettuare altri sezionamenti allora per le parti separate si otterrebbe un problema iperstatico.
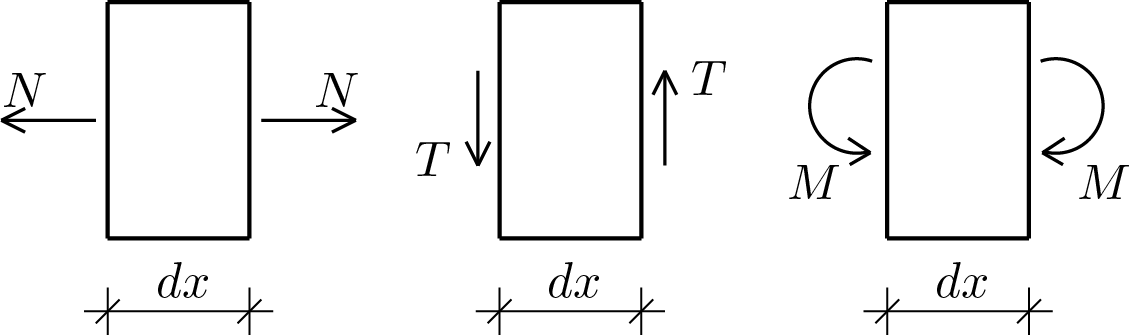
Subsection5.7.1convenzione sul segno delle sollecitazioni
Applicando la procedura di sezionamento due volte al fine di isolare un tratto di trave di lunghezza infinitesima è possibile ottenere il seguente schema (dove è stato reso evidente anche l’altezza della trave) utile ad evidenziare la convenzione correntemente utilizzata per definire le sollecitazioni di segno positivo (per maggiore chiarezza le sollecitazioni sono raprresentate separatamente).
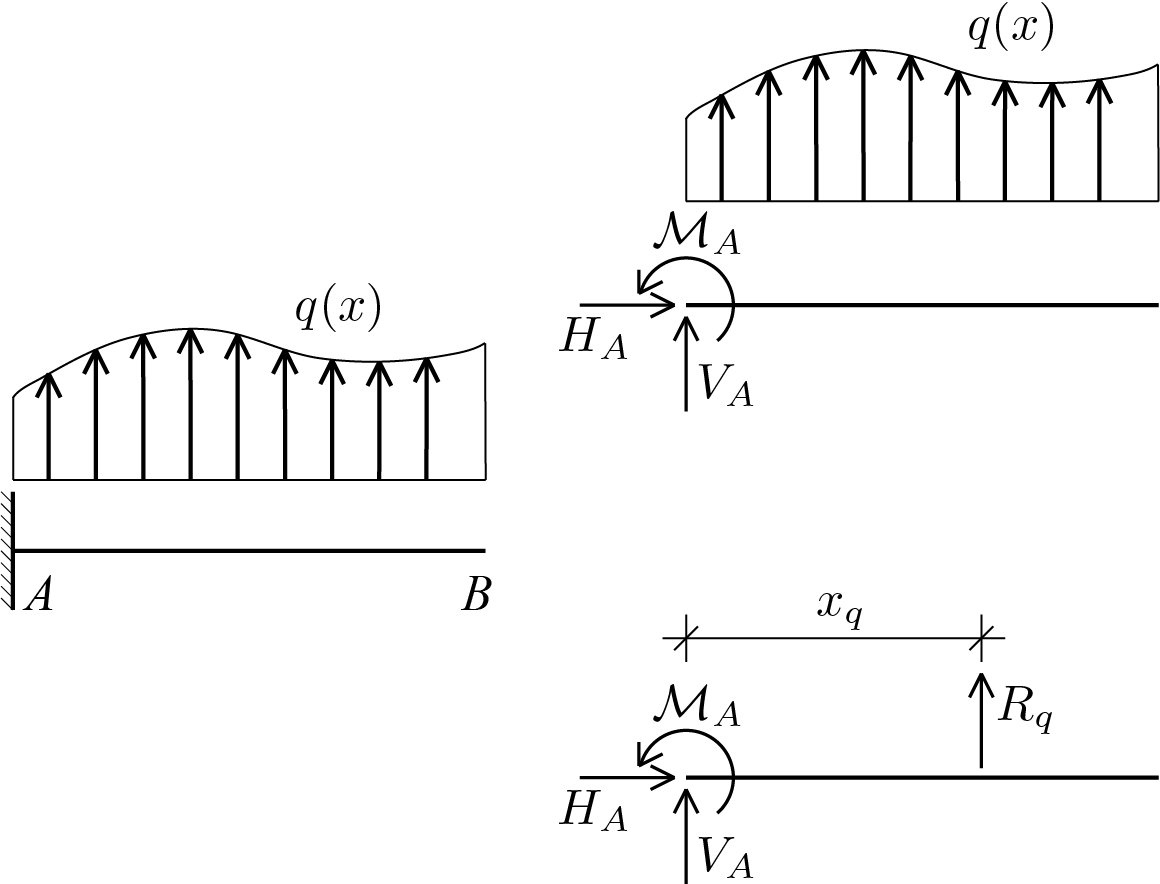
Al fine di completare la casistica dei carichi applicabili agli schemi di travi e di rendere anche possibile la trattazione generale delle equazioni indefinite di equilibrio presentate nella sezione successiva, viene discusso il caso dei carichi ripartiti. Al tal fine si consideri il seguente schema.
Lo schema rappresenta una trave incastrata ad una estremità e soggetta ad un carico ripartito variabile \(q(x)\text{.}\) L’unità di misura del carico ripartito è \(\left[ \frac{F}{L} \right]\text{,}\) per cui si parlerà di carico ripartito per unità di lunghezza. Il diagramma di corpo libero riportato in alto a destra nella figura consente la scrittura delle tre equazioni di equilibrio (orizzontale, verticale e rotazione intorno al punto \(A\)) fornendo:
dove \(x_q\) rappresenta il baricentro del carico rispetto ad un’asse passante per \(A\text{,}\) si veda l’ulteriore schema di corpo libero riportato in basso a destra nella figura. Pertanto le equazioni di equilibrio possono essere riscritte nel modo seguente:
Quindi nei sistemi soggetti a carichi ripartiti è possibile sostituire questi ultimi con le rispettive risultanti posizionate nei baricentri. Si osserva che tale sostituzione è corretta solo per il calcolo delle reazioni vincolari e non per il calcolo delle sollecitazioni che verrà meglio descritto in seguito.
Nel seguito vengono riportate le istruzioni MATLAB® per il calcolo della risultante e del baricentro per alcune tipologie di carico ripartito. Listing5.7.7.