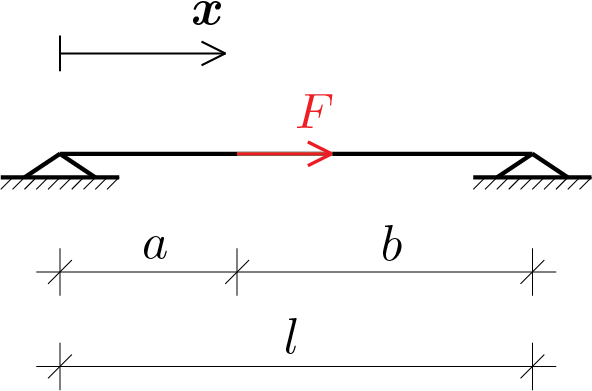
Lo schema assegnato si differenzia dallo schema considerato nella sezione precedente perché la soluzione elastica da valutare non ha un’unica espressione valida sul tutto il dominio della trave. La forza applicata all’interno dell’estensione della trave determina una discontinuità nella soluzione e quindi la necessità di studiare il problema sui due sottodimini, \(0\leq x \leq a\) e \(a\leq x \leq l\text{,}\) evidenziati in Figura. Si procede quindi valutando due soluzioni elastiche differenti ma connesse dalle necessarie condizioni al contorno all’interfaccia.
L’equazione di equilibrio, (3.5.21), applicata ai due sottodomini della trave sono formulabili come segue
\begin{align*}
\amp EA\,\frac{d^2u_a}{dx^2} = 0\,,\quad 0 \leq x \leq a\,,\\
\amp EA\,\frac{d^2u_b}{dx^2} = 0\,,\quad a \leq x \leq l\,.
\end{align*}
Si ottiene quindi un sistema di 2 equazioni differenziali dove le incognite, \(u_a\) e \(u_b\text{,}\) sono disaccopiate. Incognite che comunque interagiscono nelle condizioni al contorno. In particolare tali condizioni sono espresse dalle seguenti equazioni
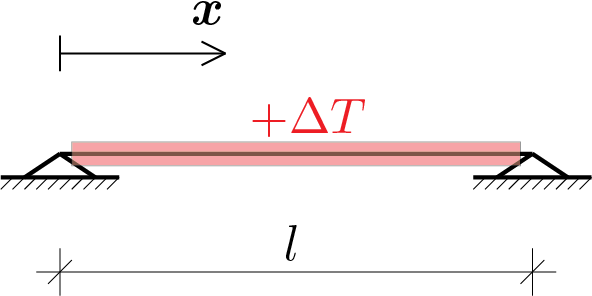
La presenza dell’incremento di temperatura determina un allungamento della trave pari a
\begin{equation*}
\Delta l_T = \alpha \Delta T \,l\,,
\end{equation*}
dove \(\alpha\) rappresenta il coefficiente di dilatazione termica del materiale. Tale allungamento è comunque impedito dalla presenza dei vincoli pertanto la trave sarà anche soggetta ad uno sforzo normale calcolabile dalla seguente equazione
\begin{equation*}
N = - EA \,\alpha \Delta T\,,
\end{equation*}
soluzione che mostra lo stato di compressione determinato dall’allungamento impedito. La soluzione in termini di spostamento è identicamente nulla su tutto la lunghezza.