L’applicazione dell’equazione
(2.2.3) assumendo come sottodominio
\(\omega\) il tetraedro di Cauchy illustrato nel video precedente fornisce
\begin{equation*}
\int_{\omega_{\delta}} \func{\vec{b}}{\vec{x}} \, dv + \int_{\partial\omega_{\delta}} \func{\vec{t}}{\vec{x}, \vec{n}} \, ds = \vec0\,.
\end{equation*}
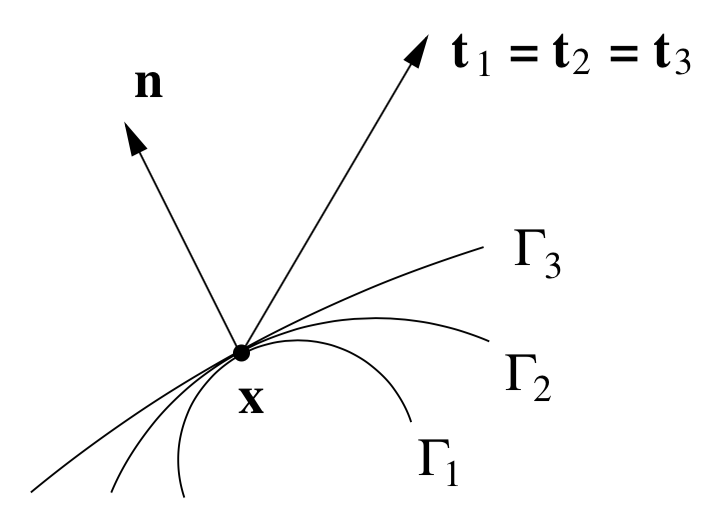
Si è già osservato che quando \(\delta \to 0\) la misura del volume \(\omega_{\delta}\) tende a zero molto più rapidamente della misura della superficie \(\partial\omega_{\delta}\text{.}\) Inoltre \(\partial\omega_{\delta} = \Gamma_{\delta}\cup\Gamma_{1}\cup\Gamma_{2}\cup\Gamma_{3}\text{,}\) allora la precedente equazione diventa
\begin{equation*}
\int_{\Gamma_{\delta}} \func{\vec{t}}{\vec{x}, \vec{n}} \, ds + \int_{\Gamma_{1}} \func{\vec{t}}{\vec{x}, -\vec{e}_1} \, ds + \int_{\Gamma_{2}} \func{\vec{t}}{\vec{x}, -\vec{e}_2} \, ds + \int_{\Gamma_{3}} \func{\vec{t}}{\vec{x}, -\vec{e}_3} \, ds = \vec0\,.
\end{equation*}
Tenendo conto della relazione geometrica che lega le facce \(\Gamma_{1}\text{,}\) \(\Gamma_{2}\) e \(\Gamma_{3}\) alla faccia \(\Gamma_{\delta}\text{,}\) si ottiene
\begin{equation*}
\func{\vec{t}}{\vec{x}, \vec{n}}\,\Gamma_{\delta} + \func{\vec{t}}{\vec{x}, -\vec{e}_1} \,\Gamma_{\delta}\,n_1 + \func{\vec{t}}{\vec{x}, -\vec{e}_2} \,\Gamma_{\delta}\,n_2 + \func{\vec{t}}{\vec{x}, -\vec{e}_3} \,\Gamma_{\delta}\,n_3 = \vec0\,,
\end{equation*}
e quindi
\begin{equation}
\func{\vec{t}}{\vec{x}, \vec{n}} = - \func{\vec{t}}{\vec{x}, -\vec{e}_1} \,n_1 - \func{\vec{t}}{\vec{x}, -\vec{e}_2} \,n_2 - \func{\vec{t}}{\vec{x}, -\vec{e}_3} \,n_3 \,.\tag{2.3.2}
\end{equation}