Nel descrivere il modello di trave inflessa si segue lo stesso schema adottato nella precedente sezione per la trave tesa. Si evita quindi di ripetere le considerazioni alla base della riduzione monodimensionale e le osservazioni fatte durante la presentazione del modello della trave tesa, osservazioni che nel presente contesto continuerebbero a valere senza alcuna modifica. Nella trattazione che segue ovviamente si prende come riferimento una soluzione 3D differente ovvero la soluzione trovata per il solido prismatico semplicemnte inflesso, si veda la Subsection 3.4.2.
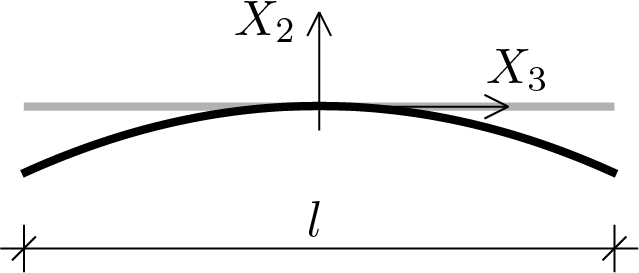
soluzione che stabilisce che la linea d’asse si deforma seguendo una parabola contenuta nel piano \(X_3\text{,}\)\(X_2\) e tutto è determinato solo dallo spostamento \(u_{2}\) diretto trasversalmente all’asse.
Il principale obiettivo rimane comunque quello di descrivere la deformazione \(\varepsilon_{33}\) dipendendente dallo spostamento \(u_3\) che sulla linea d’asse si annulla. La descrizione della componente \(u_3\) è comunque recuperabile osservando che
che evidenzia il legame di \(u_3\) con lo spostamento \(u_2\) della linea d’asse. Su tale base si può valutare la componente \(\varepsilon_{33}\) ottenendo
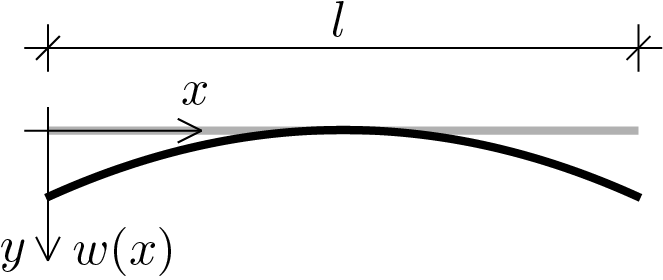
Quanto discusso può essere riformulato sulla base della notazione correntemente utilizzata, si veda la Figura seguente, nel modello di trave piana inflessa.
Pertanto la variabile cinematica del modello monodimensionale è lo spostamento trasversale \(\func{w}{x}\) e l’unica componente di deformazione significativa per il modello è
\begin{equation}
\varepsilon = - y \frac{d^2 w}{dx^2}\,.\tag{3.6.6}
\end{equation}
che rappresenta la curvatura, ente cinematico su cui compie lavoro \(M\text{.}\) Dimensionalmente \(M\) è \(\left[\text{F}\,\text{L}\right]\) e \(\chi\) è \(\left[1/\text{L}\right]\text{.}\)
\begin{equation}
M = EJ\, \chi \,.\tag{3.6.10}
\end{equation}
Relazione che evidenzia come il coefficiente di proporzionalità che definisce il legame fra \(M\) ed \(\chi\) sia dato dal prodotto fra il modulo di Young del materiale ed il momento d’inerzia della sezione della trave, \(J =\int_{A} y^2 \,dS\text{.}\)
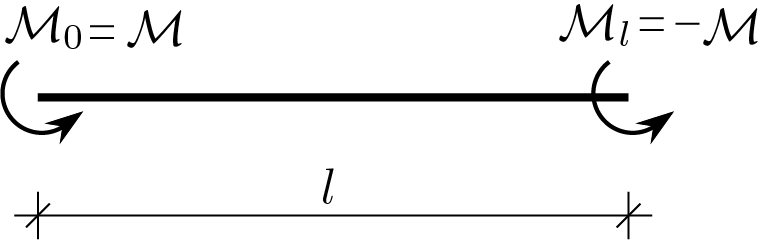
Anche per la trave inflessa, come già fatto per la trave tesa, il modello non si limita a trattare solo i carichi esterni relativi alla soluzione 3D presa come riferimento, carichi raffigurati qui di seguito.
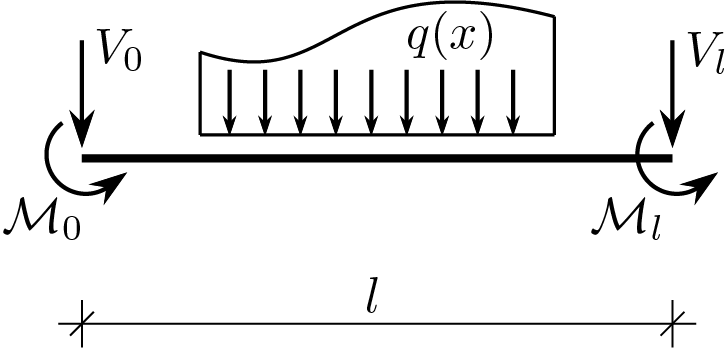
Si introduce quindi il carico per unità di lughezza \(\func{q}{x}\text{,}\) carico trasversale all’asse della trave e diretto come indicato in Figura. Su ciascuno estremo della trave si ha una coppia concentrata ed una forza concentrata verticale. Il lavoro esterno assume quindi la seguente espressione
dove le coppie di estremità compiono lavoro sulle rotazioni della trave, rotazioni che sono legate allo spostamento trasversale \(\func{w}{x}\) mediante la relazione
In conseguenza di tale scelta la variabilità di \(\func{w}{x}\) viene estesa oltre l’andamento quadratico, mentre momento flettente e curvatura, a differenza della soluzione 3D da cui si è partiti, possono essere più che costanti e descritti dalle funzioni generiche \(\func{M}{x}\) e \(\func{\chi}{x}\text{.}\)
A questo punto occorre applicare due volte l’integrazione per parti al lavoro interno al fine di estrarre le equazioni di equilibrio e le condizioni al contorno di tipo statico. La doppia integrazione per parti fornisce
Anche per il modello di trave inflessa le equazioni del modello possono essere utilizzate per eliminare dalle incognite \(M\) e \(\chi\) e mantenere solo lo spostamento \(\func{w}{x}\text{.}\) I seguenti passaggi mostrano come ottenere tale risultato