Section1.7tensore di deformazione \(\tens{U}\) e direzioni principali (trasformazione degli elementi di linea)
L’individuazione delle direzioni principali del tensore di deformazione consente di ottenenere una rappresentazione “intrinseca” della deformazione a cui è soggetto un generico punto del corpo. L’aggettivazione “intrenseca” si giustifica perché, come vedremo, si ottiene una rappresentazione più semplice dello stato deformativo ma, soprattutto, indipendente dal sistema di riferimento utilizzato.
La discussione che segue, in modo graduale, presenta l’idea che sta dietro alle direzioni principali facendo riferimento al tensore destro della deformazione, \(\tens{U}\text{,}\) in una forma particolare: la forma diagonale.
Risultato che mostra come in questo caso l’applicazione di \(\tens{U}\) a qualsiasi vettore determini soltanto una scalatura, proporzionale al fattore \(\lambda\text{,}\) della lunghezza del vettore che mantiene la direzione originaria. È facile verificare infatti che
Possiamo riepilogare quanto ottenuto come segue. Ogni direzione è una direzione principale dal momento che i vettori trasformati mantengono la direzione originaria. Il fattore di scala \(\lambda\text{,}\) che prende il nome di allungamento principale, vale per qualsiasi direzione su cui \(\tens{U}\) viene applicato determinando sul vettore di applicazione quanto segue
Tutti i vettori appartenenti a direzioni giacenti nel piano individuato dai i primi due assi di riferimento vengono semplicemente scalati dal fattore \(\lambda_1\text{.}\)
Quindi anche in questo caso \(\lambda_1\) e \(\lambda_2\) assumono il significato di fattori di scala denominati di allungamenti principali degli elementi di linea appartenenti alle direzioni principali. Per \(\lambda_1\) e \(\lambda_2\) valgono le stesse considerazioni discusse nel caso precedente.
dove tutti i coefficienti sulla diagonale sono in generale differenti. In questo caso, evitando di ripetere ulteriori considerazioni oramai ovvie, si può stabilire quanto segue.
Solo gli assi di riferimento \(\vec{e}_{1}\text{,}\)\(\vec{e}_{2}\) e \(\vec{e}_{3}\) costituiscono le direzioni principali del tensore \(\tens{U}\text{.}\)
Gli allungamenti principali\(\lambda_{1}\text{,}\)\(\lambda_{2}\) e \(\lambda_{3}\) sono tutti numeri reali positivi ed associati, rispettivamente, a \(\vec{e}_{1}\text{,}\)\(\vec{e}_{2}\) e \(\vec{e}_{3}\text{.}\) Elementi di linea appartanenti alle direzioni principali per effetto della trasformazione mantegono direzione e verso originari modificando solo la lunghezza sulla base di tali fattori di scala.
Quest’ultimo risultato è di fondamentale importanza perché consente di esprimere \(\tens{U}\) rispetto alle direzioni principali nel caso più generale, e anche più frequente, di direzioni principali non allineate con gli assi di riferimento utilizzati nel problema in esame.
Se si denotano con \(\vec{u}_{1}\text{,}\)\(\vec{u}_{2}\) e \(\vec{u}_{3}\) le generiche direzioni principali, allora la forma spettrale del tensore \(\tens{U}\) è
Gli allungamenti principali formano lo spettro di \(\tens{U}\) e le direzioni principali sono individuate dalla base ortonormale \(\vec{u}_{1}\text{,}\)\(\vec{u}_{2}\) e \(\vec{u}_{3}\text{.}\)
Da quando si è cominciato a parlare di direzioni principali non si è mai fatto accenno alla simmetria di \(\tens{U}\text{.}\) La simmetria del tensore determina la mutua ortogonalità delle direzioni principali, qualunque direzione esse assumano.
La forma spettrale (1.7.6) spiega come mai, rispetto alla base di riferimento standard, la forma matriciale del tensore \(\tens{U}\) perda quasi sempre la forma diagonale. Infatti, pur essendo sempre presenti le direzioni principali, queste in generale non coincidono con gli assi del sistema di riferimento standard. La perdita della forma diagonale viene evidenziata da una scrittura matriciale del forma spettrale del tensore
che è la modalità con cui viene valutata l’espressione che assume il tensore \(\tens{U}\) quando si passa dal sistema di coordinate costituito dalle direzioni pricipali al sistema di coordinate standard \(\vec{e}_1\text{,}\)\(\vec{e}_2\) e \(\vec{e}_3\text{.}\) La matrice utilizzata per la trasformazione viene costruita inserendo nelle colonne i vettori \(\vec{u}_{1}\text{,}\)\(\vec{u}_{2}\) e \(\vec{u}_{3}\text{.}\)
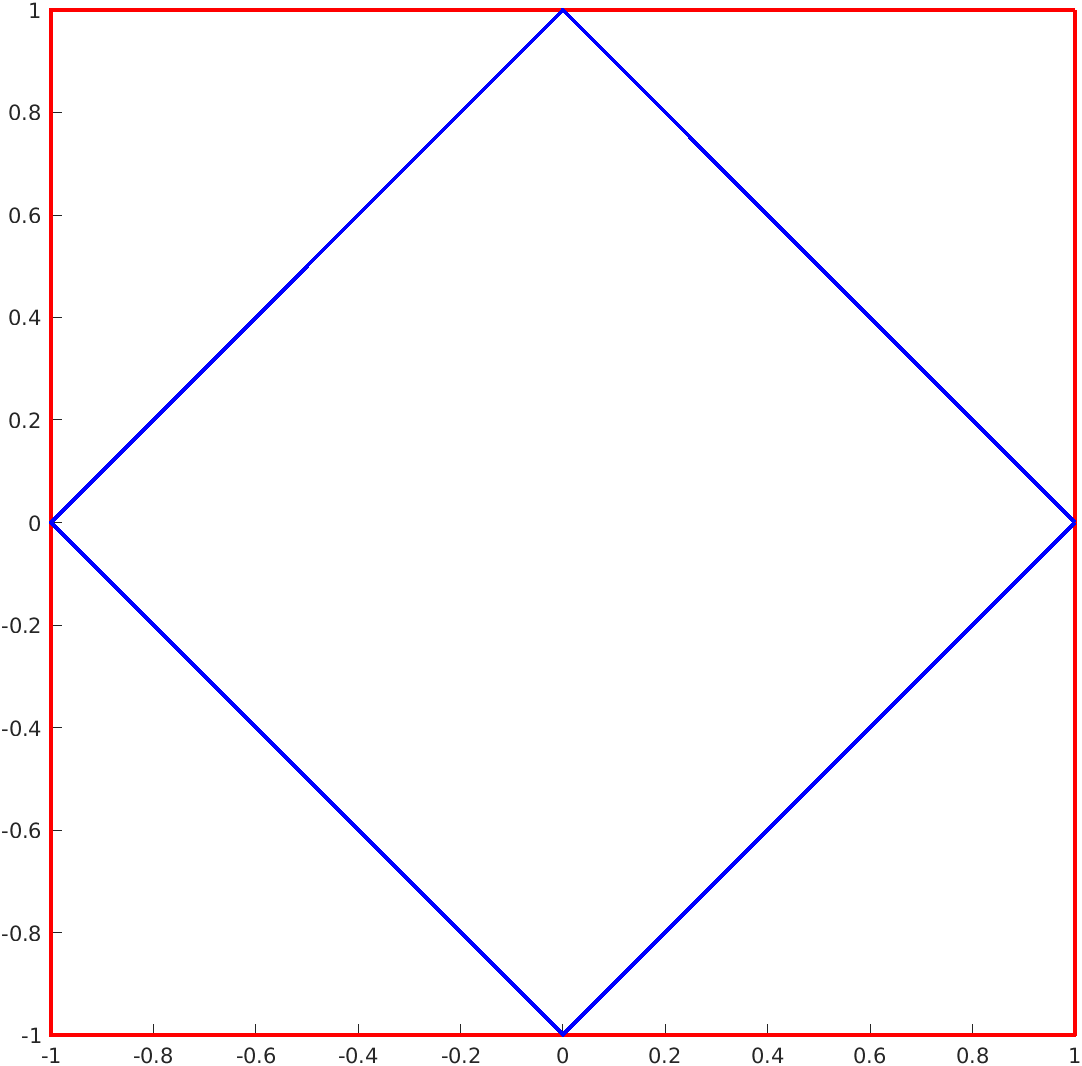
Al fine di verificare come il tensore \(\tens{U}\) agisca in modo differente sulle direzioni principali e sulle direzioni individuate dal riferimento standard, si consideri il seguente stato piano caratterizzato dalla seguente forma diagonale di \(\tens{U}\)
Si assuma per le direzioni principali un’inclinazione di \(\pi/4\) e si applichi quindi il tensore della deformazione ai due quadrati, rappresentati nella seguente figura. Il quadrato di colore rosso ha lati allineati con il riferimento standard, il quadrato di colore blu ha invece lati allineati con le direzioni principali.
L’applicazione del tensore viene effettuata facendo crescere il parametro \(\lambda\text{,}\) da cui dipendono i due autovalori del tensore, dal valore \(1.1\) al valore \(1.5\text{.}\)
Si riportano le istruzioni MATLAB® utilizzabili per il calcolo e la visualizzazione delle deformate dei due quadrati a partire dalle configurazioni iniziali.
Noti gli allungamenti principali \(\lambda_i\) e le direzioni principali ad essi associate \(\vec{u}_i\) (\(i=1 \dots 3\)), la forma spettrale (1.7.6) consente di valutare facilmente il tensore \(\tens{U}\) rispetto al sistema di riferimento utilizzato.
Lo scenario tipico è, comunque, ribaltato. Ovvero dato il tensore \(\tens{U}\) si vogliono valutare gli allungamenti e le direzioni principali. Risolvere tale quesito vuol dire calcolare gli autovalori e gli autovettori della matrice associata al tensore \(\tens{U}\text{.}\) Nella presente sezione non verrà presentata la procedura da utilizzare nella soluzione del problema agli autovalori perché questa costituisce un argomento che sicuramente è già stato oggetto di studio in corsi precedenti e per il quale la letteratura disponibile, anche in rete, è vasta. In questa sede si è ritenuto più importante mettere in evidenza il significato meccanico di autovalori ed autovettori, significato ampiamente discusso nelle sezioni precedenti.
dove compare il polinomio caratteristico il quale dipendende da tre quantità che prendono il nome di invarianti del tensore \(\tens{U}\text{.}\) Il termine invariante sta ad indicare che tali valori non cambiano al variare del sistema di riferimento rispetto al quale viene rappresentato \(\tens{U}\text{.}\) Si riportano le espressioni da utilizzare per il calcolo degli invarianti nel caso il tensore \(\tens{U}\) sia espresso alle direzioni principali e nel caso generico.