La definizione del legame elastico fornita nelle precedenti sezioni consente di formulare in termini ben posti il seguente problema noto come problema elastico.
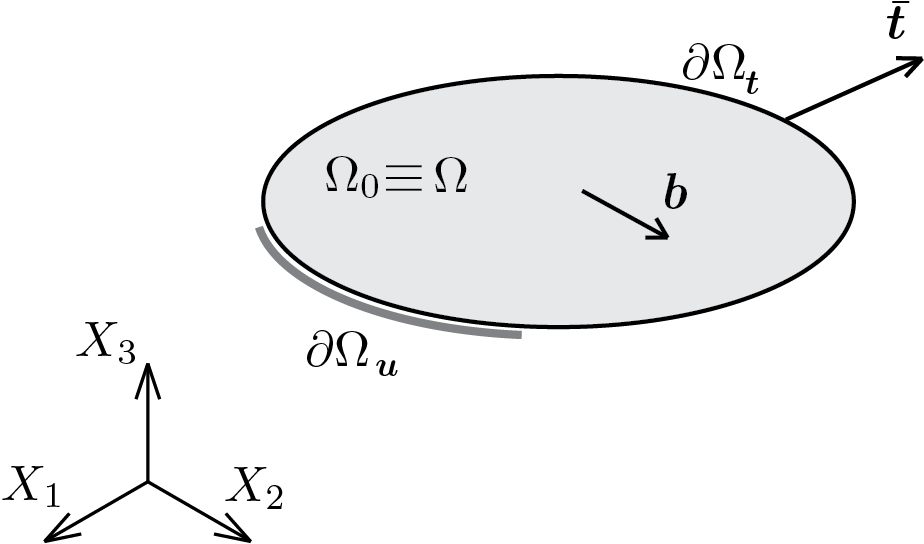
Determinazione dei campi di spostamento, \(\vec{u}\text{,}\) di tensione, \(\tens{\sigma}\text{,}\) ed di deformazione, \(\tens{\varepsilon}\text{,}\) indotti dalle condizioni di carico assegnate in un corpo \(\body\) comunque vincolato.
Per completare la formulazione del problema è necessario assegnare anche le condizioni al contorno che, in generale, possono essere di due tipi: di tipo statico sulla parte di contorno \(\partial\body_{\vec{t}}\) e di tipo cinematico sulla parte di contorno \(\partial\body_{\vec{u}}\text{.}\) Si osserva che \(\partial\body=\partial\body_{\vec{u}}+\partial\body_{\vec{t}}\text{.}\)
Condizioni al contorno di tipo statico, definite su \(\partial\body_{\vec{t}}\)
Subsection3.4.1motivazione di inizio capitolo: il solido prismatico semplicemente teso
A questo punto possiamo riprendere il problema del solido prismatico soggetto a trazione presentato nella Section 3.1 all’inizio del presente capitolo.
La soluzione statica già trovata, comunque corretta perché soddisfa le equazioni di equilibrio (3.4.1) all’interno del solido e le condizioni di tipo statico sul contorno (3.4.4), è
Il legame deformazione-spostamento (3.4.2) consente la determinazione del campo di spostamento. Infatti la scrittura esplicita del legame, si veda la (1.9.4), fornisce
Al riguardo si osserva che si parla di una soluzione in quanto sommando a tale campo di spostamento tutti i possibili moti rigidi, che nel problema assegnato non sono esplicitamente eliminati, si otterrebbe sempre la stessa soluzione in termini di campi di tensione e deformazione.
Sulla base del campo di spostamento definito dalle (3.4.13) si utilizzino le seguenti istruzioni MATLAB® per calcolare i relativi campi di deformazione e di tensione. Listing3.4.2.
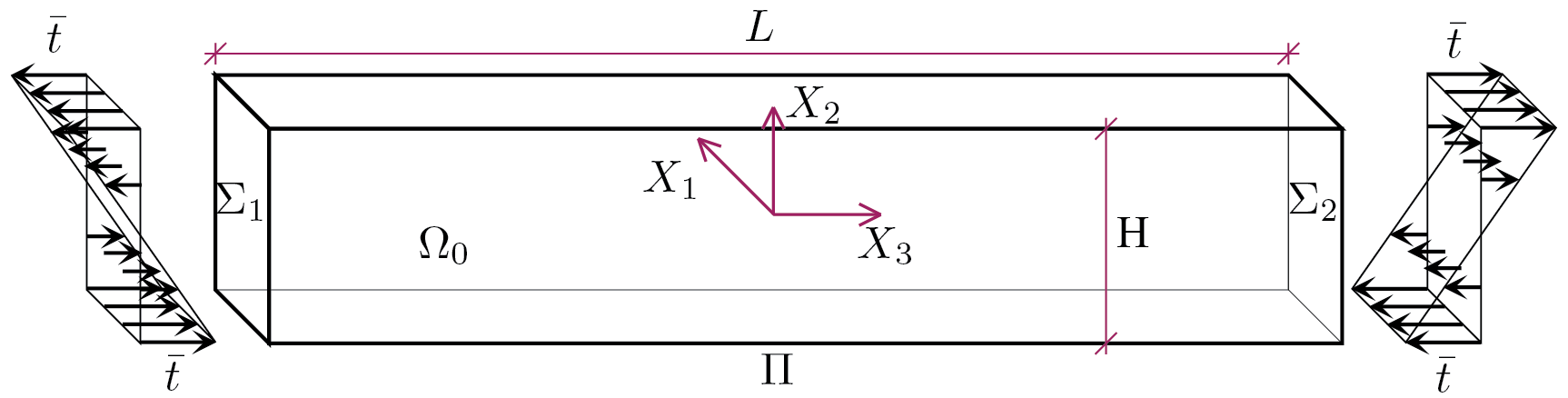
Quanto ottenuto per il solido prismatico soggetto a campi di trazione uniformi alle estremità può essere facilmente esteso al caso in cui le trazioni applicate alle estremità abbiano l’andamento lineare mostrato nella figura seguente.
La formulazione della parte statica del problema è identica a quella fatta per il solido prismatico semplicemente teso eccetto per le facce di estremità del solido sulle quali le trazioni applicate assumono la seguente espressione
dove \(H\) rappresenta l’altezza del solido lungo la direzione \(X_2\) e \(\bar{t}\) è l’intensità della trazione applicata sui lembi superiore ed inferiore.
Anche in questo caso si può procedere assumendo una soluzione di tentativo per il tensore della tensione per poi verificare il soddisfacimento delle equazioni di equilibrio e delle condizioni al contorno. In particolare per \(\tens{\sigma}\) si assume la seguente forma
Ripercorrendo gli stessi passi fatti nella Subsubsection 3.1.1.1 per il solido semplicemente teso, si passa alla verifica o imposizione delle condizione al contorno. In particolare si verifica facilmente il soddisfacimento della (3.1.6), infatti
Quindi la soluzione statica è data da uno stato di trazione pura nella direzione \(X_3\) distribuito linearmente lungo l’asse \(X_2\text{.}\) Per maggiore comodità degli sviluppi successivi continueremo ad utilizzare l’espressione \(\sigma_{33}=\kappa\,X_2\) ricordando comunque che \(\kappa=\frac{\bar{t}}{H/2}\text{.}\)
Analogamente al solido semplicemente, si noti come la soluzione ottenuta coivolga solo la componente \(\sigma_{33}\) del tensore. Differisce solo la forma della soluzione che invece di essere costante è lineare lungo lasse \(X_2\text{.}\)
Subsubsection3.4.2.2dalla tensione agli spostamenti
Per risalire alla soluzione in termini di spostamenti occorre prima utilizzare il legame elastico per valutare le componenti del tensore di deformazione ed ottenere quanto segue
Sulla base del campo di spostamento definito dalle (3.4.25), (3.4.26), (3.4.27) è possibile verificare il risultato ottenuto con le seguenti istruzioni MATLAB®. Listing3.4.5.
Si riporta una sintesi delle soluzioni trovate per i solidi prismatici seplicemente teso ed inflesso al fine anche di mostrare le evidenti analogie. Per ogni campo trovato, tensione, deformazione e spostamento, si riportano solo le componenenti non nulle.