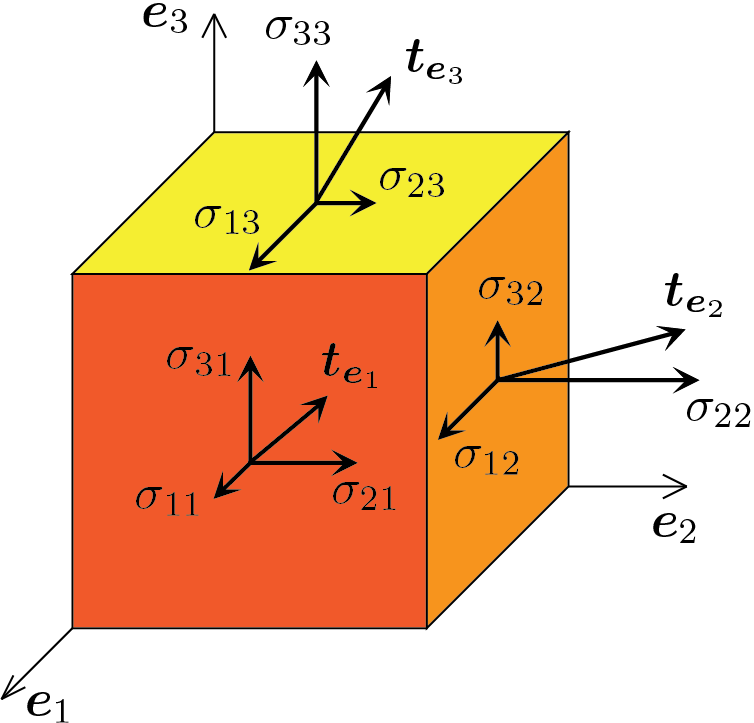
La figura mostra i tre piani che si prendono come riferimento, ovvero i piani aventi come normale uscente gli assi \(\vec{e}_1\text{,}\)\(\vec{e}_2\) e \(\vec{e}_3\text{.}\) A tali facce, che si considerano positive, si riferiscono le componenti del tensore della tensione e la figura riporta tali componenti secondo i versi che si assumono positivi. Se immaginiamo di osservare un cubo, come suggerisce la figura, le facce nascoste del cubo hanno come normale uscente le direzioni opposte \(-\vec{e}_1\text{,}\)\(-\vec{e}_2\) e \(-\vec{e}_3\text{.}\) Su tali facce, che si considerano negative, agiranno le stesse componenti di tensione di segno opposto. Ad esempio sulla faccia avente giacitura \(-\vec{e}_1\) agirà la trazione \(\vec{t}_{-\vec{e}_1} = -\vec{t}_{\vec{e}_1}\text{.}\)
che rappresenta, si veda anche la figura, la componente normale della trazione \(\vec{t}_{\vec{e}_1}\text{.}\) Se si calcola il prodotto scalare tra \(\vec{t}_{\vec{e}_1}\) e la direzione \(\vec{e}_2\) si ottiene
Le stesse valutazioni possono essere fatte per le altre trazioni \(\vec{t}_{\vec{e}_2}\) e \(\vec{t}_{\vec{e}_3}\text{.}\) Quanto si ottiene può essere riepilogato come segue.
costituiscono le componenti tangenziali del tensore. Il segno delle componenti tangenziali segue la convenzione indicata in figura ma, a differenza delle componenti normali, non ha un particolare significato fisico dal momento che il tipo di carico non cambia al cambiare del segno.
Per ogni componente del tensore il secondo indice si riferisce alla giacitura su cui agisce la trazione e il primo indice si riferisce alla componente della trazione.
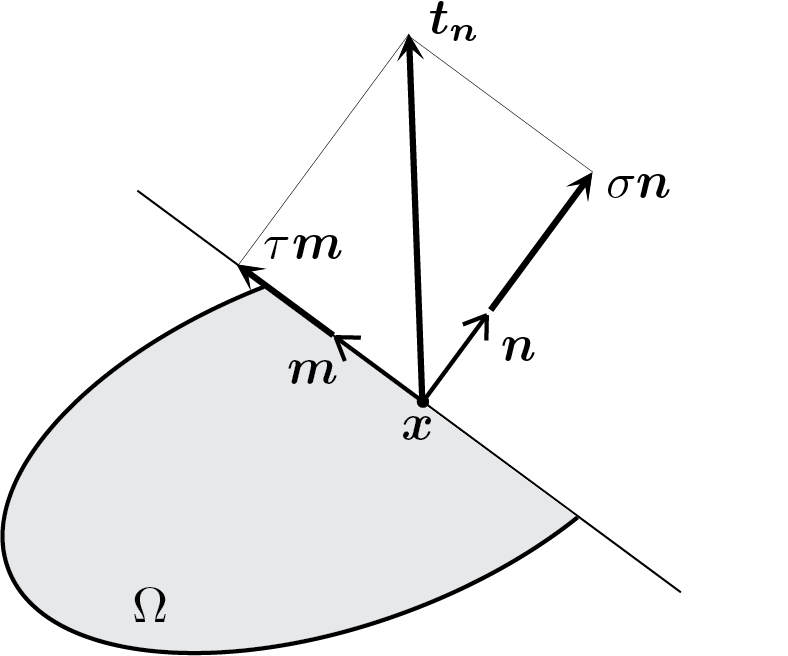
Quanto discusso per le componenti del tensore vale anche per una giacitura generica \(\vec{n}\text{.}\) Come stabilito dal Teorema della tensione di Cauchy si ha
Per denotare le due componenti si è utilizzata la convenzione, spesso adottata in ambito ingegneristico, che indica le componenti normale e tangenziale rispettivamente con i simboli \(\sigma\) e \(\tau\text{.}\) Il vettore \(\vec{m}\text{,}\) come \(\vec{n}\text{,}\) è un vettore di lunghezza unitaria.
Subsection2.4.2tensioni principali e direzioni principali
Quanto discusso nella Section 1.7 relativa alle direzioni principali del tensore \(\tens{U}\) è applicabile in larga parte anche al tensore della tensione \(\tens{\sigma}\text{.}\) Ambedue i tensori sono simmetrici e l’unico fondamentale distinguo che occorre effettuare è che, a differenza di \(\tens{U}\text{,}\)\(\tens{\sigma}\) non è definito positivo. Pertanto in questo caso gli autovalori, che individuano adesso le tensioni principali del tensore, potranno essere anche nulli o negativi. Comunque la simmetria di \(\tens{\sigma}\) consente la seguente rappresentazione spettrale del tensore
dove le direzioni principali\(\vec{s}_1\text{,}\)\(\vec{s}_2\text{,}\)\(\vec{s}_3\) sono gli autovettori di \(\tens{\sigma}\text{,}\) i quali costituiscono una terna ortonormale, e \(\sigma_1\text{,}\)\(\sigma_2\text{,}\)\(\sigma_3\) sono le tensioni principali.
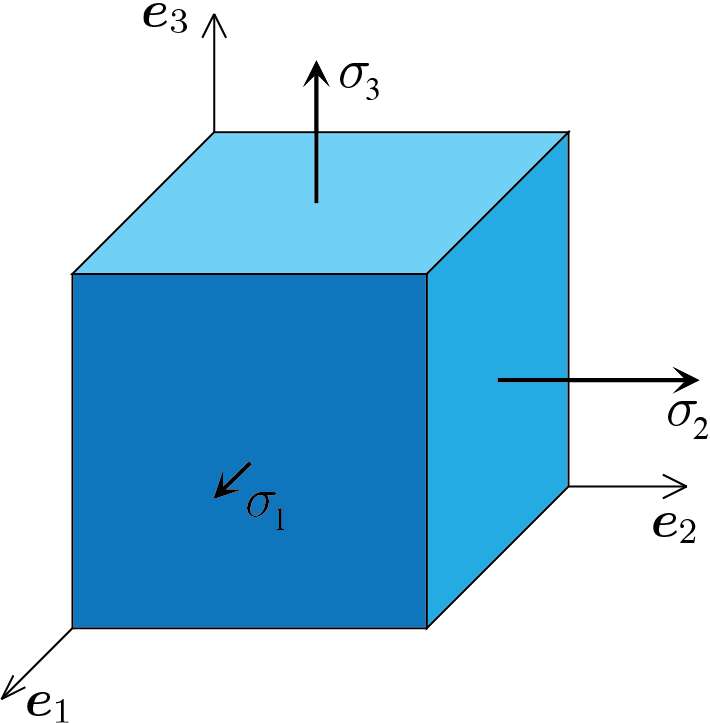
che individua uno stato tensionale descritto solo da componenti di tipo normale. Componenti di trazione se la componente è positiva, di compressione se la componente è negativa. Tale situazione viene illustrata nelle seguente figura.
Se invece le direzioni principali non sono allineate con il sistema di riferimento il tensore \(\tens{\sigma}\) assume la forma generica con la presenza anche di componenti tangenziali.
Assegnato un tensore \(\tens{\sigma}\) l’individuazione delle tensioni e delle direzioni principali richiede il calcolo degli autovalori e degli autovettori effetuabile, come si mostrerà in seguito, tramite MATLAB®.
Anche in questo caso, come già discusso nel capitolo dedicato alla cinematica, la soluzione del problema agli autovalori richiede la soluzione di una equazione cubica esprimibile come segue
dove compaiono gli invarianti del tensore \(\tens{\sigma}\text{,}\) ovvero le quantità che sono indipendenti dal sistema di riferimento rispetto al quale viene rappresentato \(\tens{\sigma}\text{.}\) Gli invarianti di \(\tens{\sigma}\) sono calcolabili con le seguenti coppie di espressioni, dove ogni coppia contiene la formula da utilizzare nel caso in cui il tensore \(\tens{\sigma}\) sia espresso rispetto alle direzioni principali e la formula da utilizzare nel caso generico.
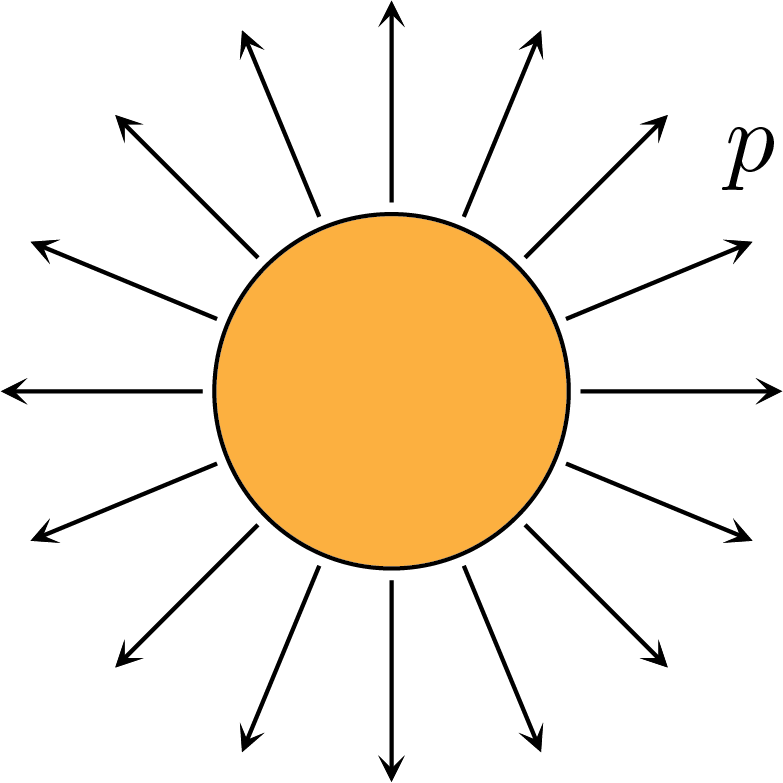
Lo stato tensionale che mantiene sempre la stessa forma rispetto a qualsiasi sistema di riferimento è lo stato caratterizzato da tensioni principali che assumono lo stesso valore, ovvero \(\sigma_1 = \sigma_2 = \sigma_3 = p\text{.}\) In tal caso, utilizzando la (2.4.3), il tensore \(\tens{\sigma}\) assume la seguente forma
Assumendo \(p\) positivo si ha uno stato di trazione uguale in tutte le direzioni, da qui l’aggettivo sferico. Se invece \(p\) è negativo si ha uno stato di compressione uguale in tutte le direzioni, proprio come avviene per un corpo immerso in un fluido. Da qui l’aggettivo idrostatico.
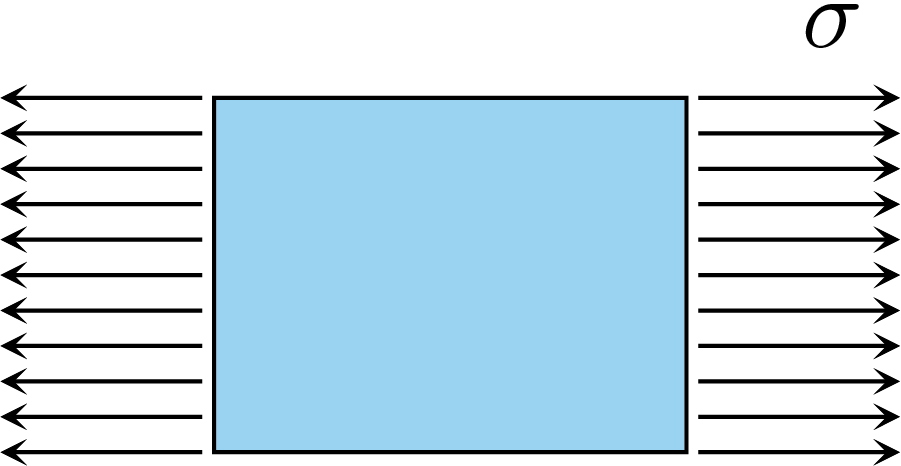
caratterizzato quindi da tensioni principali pari a \(\sigma_1 = \sigma\text{,}\)\(\sigma_2 = 0\text{,}\)\(\sigma_3 = 0\) e direzioni principali individuate dall’asse \(\vec{e}_1\) e dal piano definito dalgi altri due assi della terna, viene di solito etichettato, in base al segno di \(\sigma\text{,}\)stato di trazione o compressione “pura”.
L’aggetivazione “pura” non deve trarre in inganno in quanto vale solo per la disposizione delle direzioni principali appena descritta. È sufficiente infatti assumere una disposizione differente per le direzioni principali, ad esempio ottenuta con una rotazione generica intorno all’asse \(\vec{e}_3\text{,}\) per avere
Per la discussione dello stato di taglio “puro” occorre lasciare il punto di vista dato dalle direzioni principali e parlare direttamente di uno stato tensionale caratterizzato dalla seguente rappresentazione per componenti
In tal caso, sempre relativamente al sistema di riferimento \(\vec{e}_1\text{,}\)\(\vec{e}_2\text{,}\)\(\vec{e}_3\) utilizzato, si parlerà di stato di taglio “puro” in quanto l’unica componente non nulla del tensore è \(\sigma_{12}=\sigma_{21}=\tau\text{.}\)
Il calcolo di direzioni principali e tensioni principali mostrerebbe che ci troviamo in un caso differente dai precedenti. Infatti il calcolo degli autovalori ed autovettori, effettuabile con le seguenti istruzioni MATLAB®
Quindi le direzioni principali sono ruotate di \(\pi/4\) intorno all’asse \(\vec{e}_3\) (si riportano gli autovettori normalizzati anche se, nel caso di calcolo simbolico, MATLAB® non fornisce autovettori normalizzati).
come lo stato tensionale che si realizza quando il sistema di riferimento è ottenuto ruotando la terna delle direzioni principali di \(\pi/4\) intorno al terzo asse e le tensioni principali sono definite da