Remark 3.1.2. assunzione molto importante.
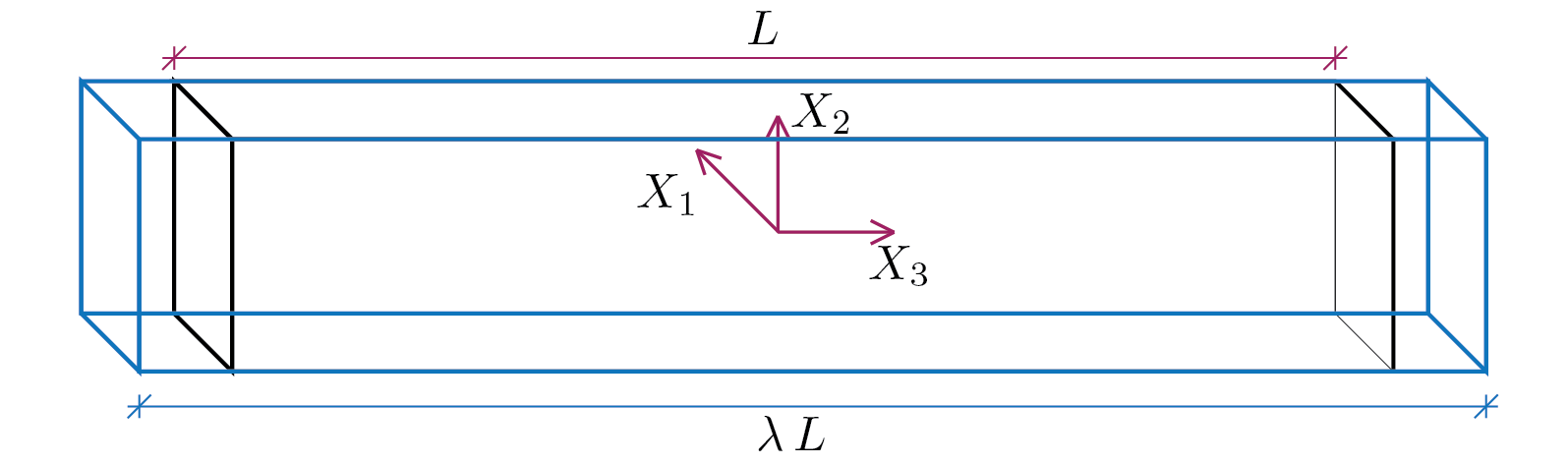
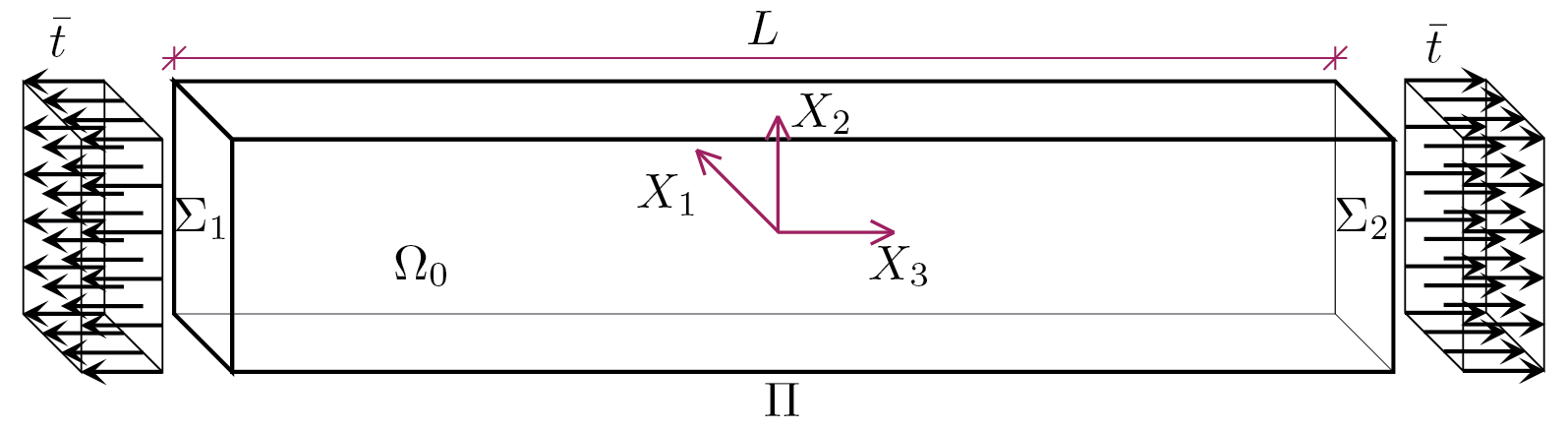
La descrizione geometrica appena data riguarda solo la configurazione di riferimento \(\body_0\) a cui tipicamente si riferisce la descrizione cinematica dei corpi così come presentato nel Chapter 1. La scrittura delle equazioni equilibrio, si veda al riguardo il Chapter 2, viene invece effettuta rispetto alla configurazione corrente \(\body\text{.}\) La seguente discussione quindi dovrebbe tenere conto di tale situazione richiedendo anche l’introduzione di ulteriori concetti che esulano dalla presente trattazione introduttiva di Meccanica dei solidi.
Pertanto si introduce l’ipotesi alla base di una formulazione linearizzata del problema elastico, che è l’obiettivo finale del presente capitolo, ovvero che le equazioni di equilibrio possano essere formulate assumendo
\begin{equation}
\body \equiv \body_0 \tag{3.1.1}
\end{equation}