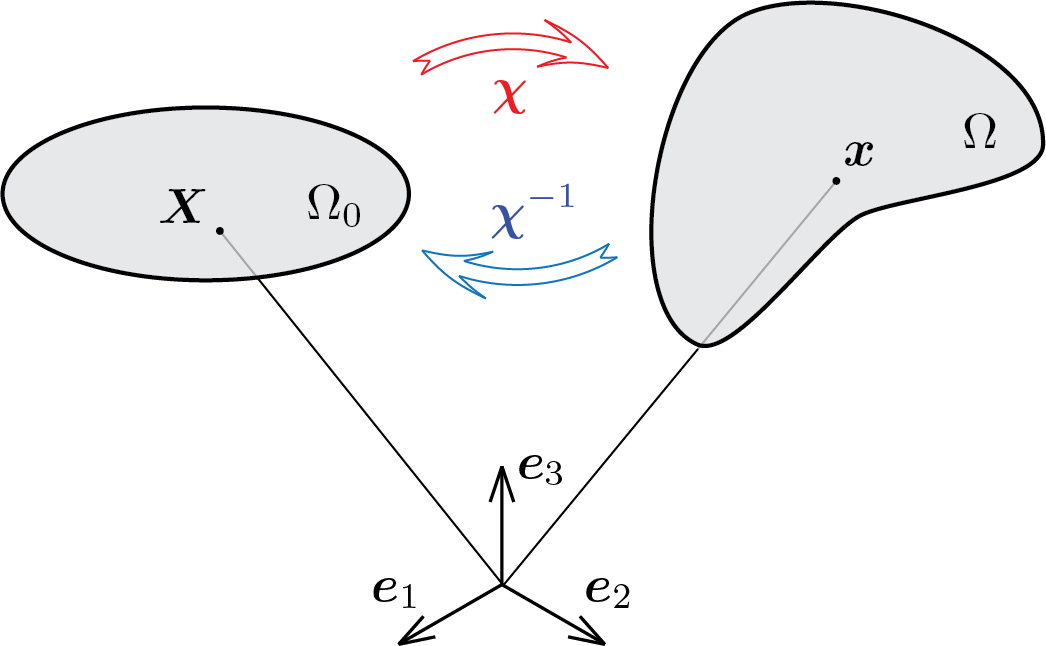
valida \(\forall\vec{X} \in \body_0\text{.}\)\(\vec{\chi}\) è una funzione vettoriale che, data una posizione \(\vec{X}\) relativa alla configurazione di riferimento, fornisce la nuova posizione \(\vec{x}\) relativa alla configurazione corrente. La dipendenza fra \(\vec{x}\) e \(\vec{X}\) a volte viene indicata rapidamente come segue
dove il simbolo \(\vec{\chi}^{-1}\) indica il moto inverso che associa alla posizione corrente \(\vec{x}\) la posizione \(\vec{X}\) nella configurazione di riferimento.
In generale il moto \(\vec{\chi}\) di un corpo modificherà la posizione, l’orientazione e la forma del corpo. Si dirà quindi deformabile un corpo in grado di modificare la propria forma.
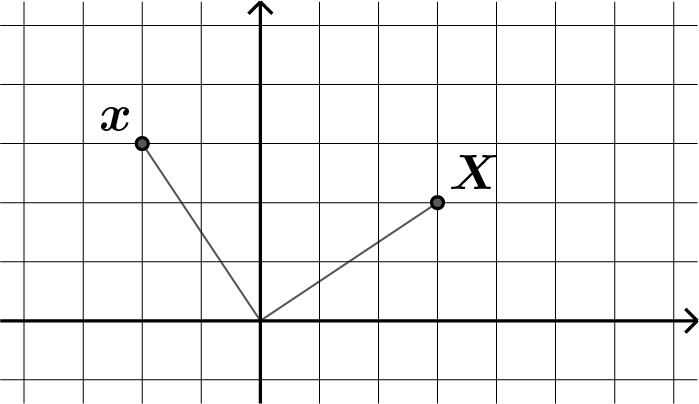
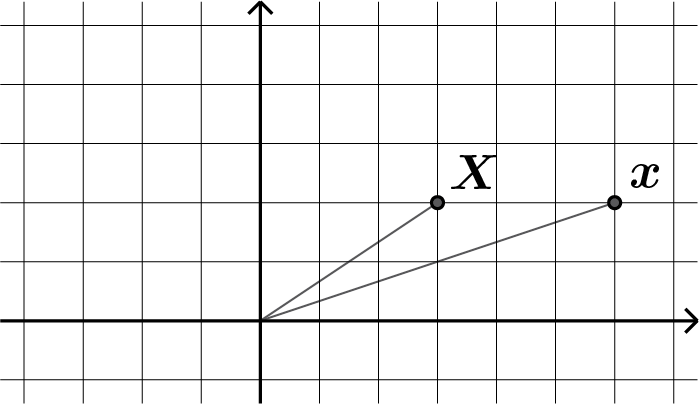
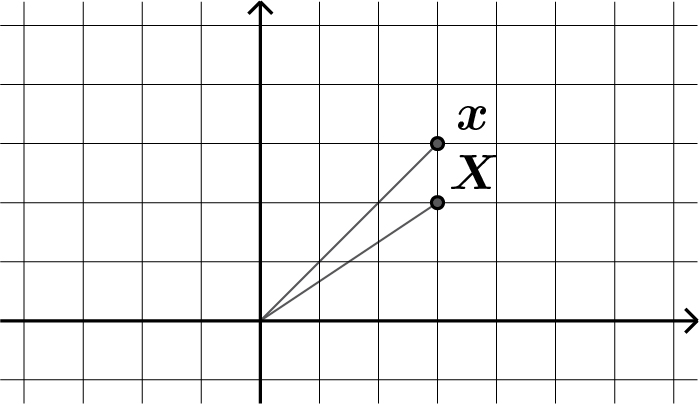
Pertanto nel caso in cui la trasformazione \(\vec{\chi}\) è lineare la sua azione sul vettore \(\vec{X}\) è esplicabile attraverso la matrice \(\mat{M_{\chi}}\) definita come segue
dove \(\func{\vec{\chi}}{\vec{e}_1}\text{,}\)\(\func{\vec{\chi}}{\vec{e}_2}\) e \(\func{\vec{\chi}}{\vec{e}_3}\) sono i vettori ottenuti applicando la trasformazione \(\vec{\chi}\) ai vettori della base di riferimento. Pertanto la trasformazione di qualsiasi vettore \(\vec{X}\) potrà essere ottenuta in modo equivalente applicando la matrice \(\mat{M_{\chi}}\text{:}\)
È importante sottolineare ancora che è possibile identificare la matrice \(\mat{M_{\chi}}\) solo nel caso di trasformazione lineare. Inoltre, vale anche l’inverso, ovvero l’esistenza di una matrice \(\mat{M_{\chi}}\) utilizzabile per rappresentare una trasformazione implica la linearità della trasformazione.