Section5.8equazioni indefinite di equilibrio per la trave piana
Le equazioni indefinite di equilibrio per la trave sono già state trattate nella Section 3.5 e nella Section 3.6 nel contesto più ampio che ha portato alla costruzione di un modello completo di trave piana elastica. In questa sede le equazioni vengono ricavate per altra via e l’unica differenza consiste nell’esplicitazione della componente di sollecitazione data dal taglio.
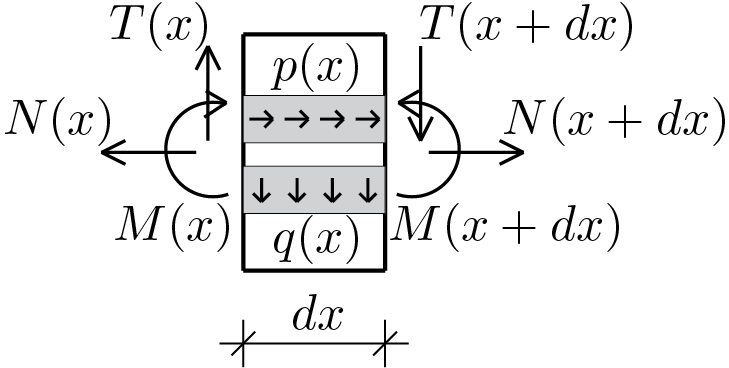
All’interno di una trave soggetta a condizioni di carico generiche, si supponga di isolare un tratto di trave di lunghezza infinitesima \(dx\text{.}\) Il tratto di trave così individuato è soggetto ad una serie di azioni illustrate nella figura successiva e che, per chiarezza, vengono di seguito elencate:
le componenti di sollecitazione, \(N(x)\text{,}\)\(T(x)\) e \(M(x)\text{,}\) relative all’ascissa \(x\text{;}\)
Lo schema ottenuto è essenzialmente un diagramma di corpo libero per il quale è possibile imporre le seguenti equazioni di equilibrio (il polo utilizzato per l’equilibrio alla rotazione è posto all’ascissa \(x+dx\))
L’ipotesi di continuità del solido mono-dimensionale e delle grandezze su di esso definite, consente di effettuare uno sviluppo in serie di Taylor troncato al primo ordine delle sollecitazioni valutate sulla sezione \(x+dx\) e di ottenere quindi
dove le quantità \(\regulardiff{N}{x}\text{,}\)\(\regulardiff{T}{x}\) e \(\regulardiff{M}{x}\) indicano le derivate delle sollecitazioni rispetto all’ascissa \(x\text{.}\) Facendo le dovute semplificazioni e trascurando il termine \(q(x)\frac{dx^2}{2}\) perché di ordine superiore al primo, si ottengono le equazioni indefinite di equilibrio per la trave piana di seguito elencate.
L’integrazione delle equazioni indefinite di equilibrio fornisce i seguenti integrali generali validi su tratti di trave lungo i quali le sollecitazioni sono analitiche nella variabile \(x\text{:}\)
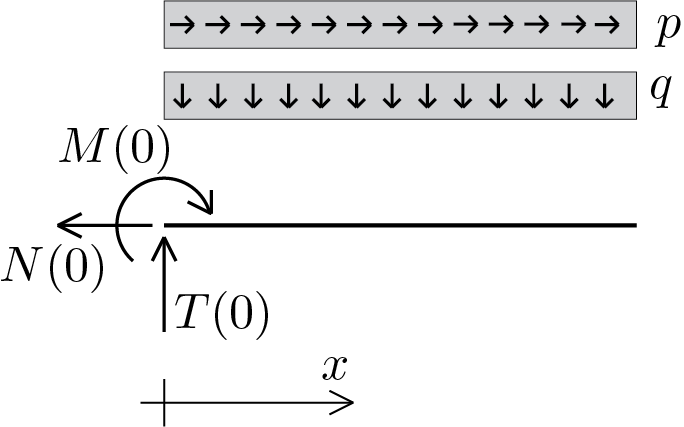
Lo schema riporta il caso di una trave di cui sono noti i valori delle componenti di sollecitazione all’estremo \(x=0\) ed è soggetta a carichi ripartiti costanti. In tal caso gli integrali generali (5.8.10), (5.8.11) e (5.8.12) assumono le seguenti espressioni