Se si considera il caso in cui siano soltanto due le componenti non nulle delle forze applicate e delle posizioni dei punti dello spazio, l’equazione vettoriale (5.1.7) è esprimibile solo mediante due equazioni scalari e l’equazione vettoriale (5.1.8) si riduce ad una sola equazione scalare. Ovvero
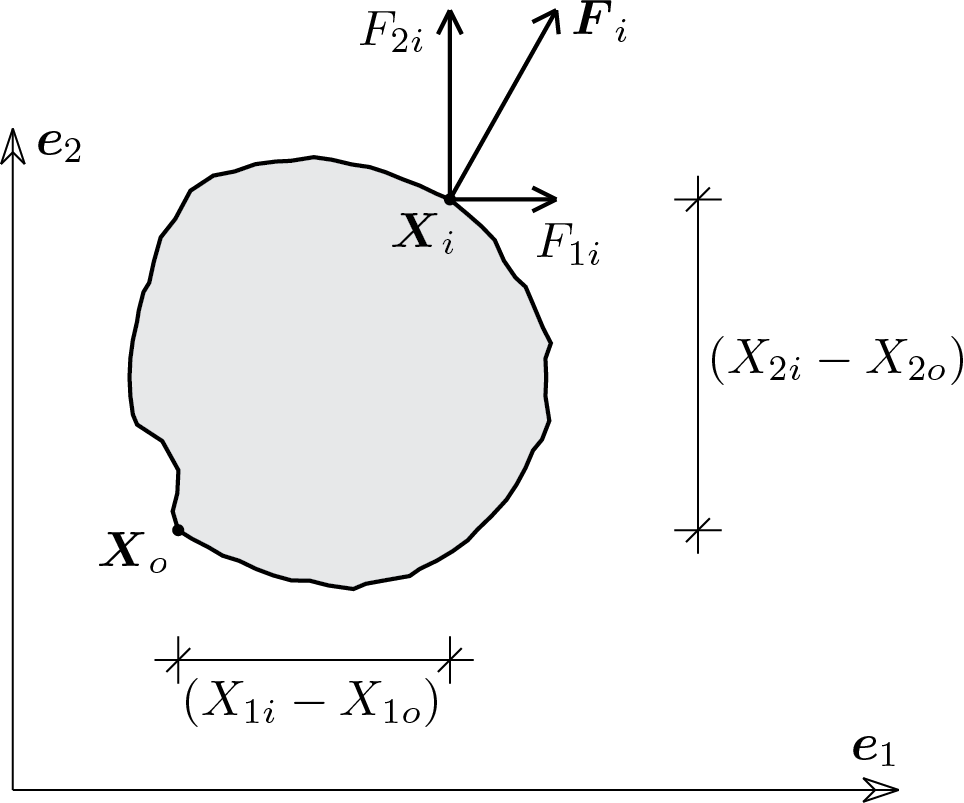
La condizione (5.2.1) esprime l’annullamento della somma di tutte le forze orizzontali applicate, ovvero le componenti lungo l’asse 1 delle forze applicate. La condizione (5.2.2) impone l’annullamento della somma di tutte le forze verticali applicate, ovvero le componenti lungo l’asse 2 delle forze applicate. La condizione (5.2.3) esprime l’annullamento della somma dei momenti esercitati dalle forze orizzontali e verticali rispetto al punto scelto come polo. La seguente figura illustra per il caso di una singola forza il significato dei termini presenti nelle equazioni.
Le seguenti istruzioni MATLAB® consentono di valutare le risultanti delle forze orizzontali, delle forze verticali e dei momenti a partire dai carichi applicati sui singoli punti di un corpo rigido. Listing5.2.2.
$ % vettore delle risultanti =
% [orizzontale; verticale; momento]
R = zeros(3,1);
% funzione per il calcolo del momento
momento = @(X0, X, Carico)...
-Carico(1)*(X(2)-X0(2))+Carico(2)*(X(1)-X0(1));
% coordinate dei punti sui quali sono applicati i carichi
syms L;
A = [0; 0];
B = [L; 0];
C = [L; L/2];
% scelta del polo
POLO = A;
% per ogni punto si assegna il vettore Carico = [F1; F2; M]
% e si sommano i contributi alla risultante
syms F;
CaricoA = [F; F; 0];
R = R + CaricoA;
R(3) = R(3) + momento(POLO, A, CaricoA);
R
CaricoB = [-F; -F; 0];
R = R + CaricoB;
R(3) = R(3) + momento(POLO, B, CaricoB);
R
CaricoC = [-F; 2*F; F*L];
R = R + CaricoC;
R(3) = R(3) + momento(POLO, C, CaricoC);
R
if and(and(R(1) == 0, R(2) == 0), R(3) == 0)
disp('Sistema equilibrato')
else
disp('Sistema non equilibrato')
end