La modellazione elastica degli stati uniassiali, ovvero stati di tensione e deformazione in cui sono presenti soltanto una componente di tensione e la componente associata di deformazione, può essere effettuata tramite un’applicazione diretta della legge di Hooke.
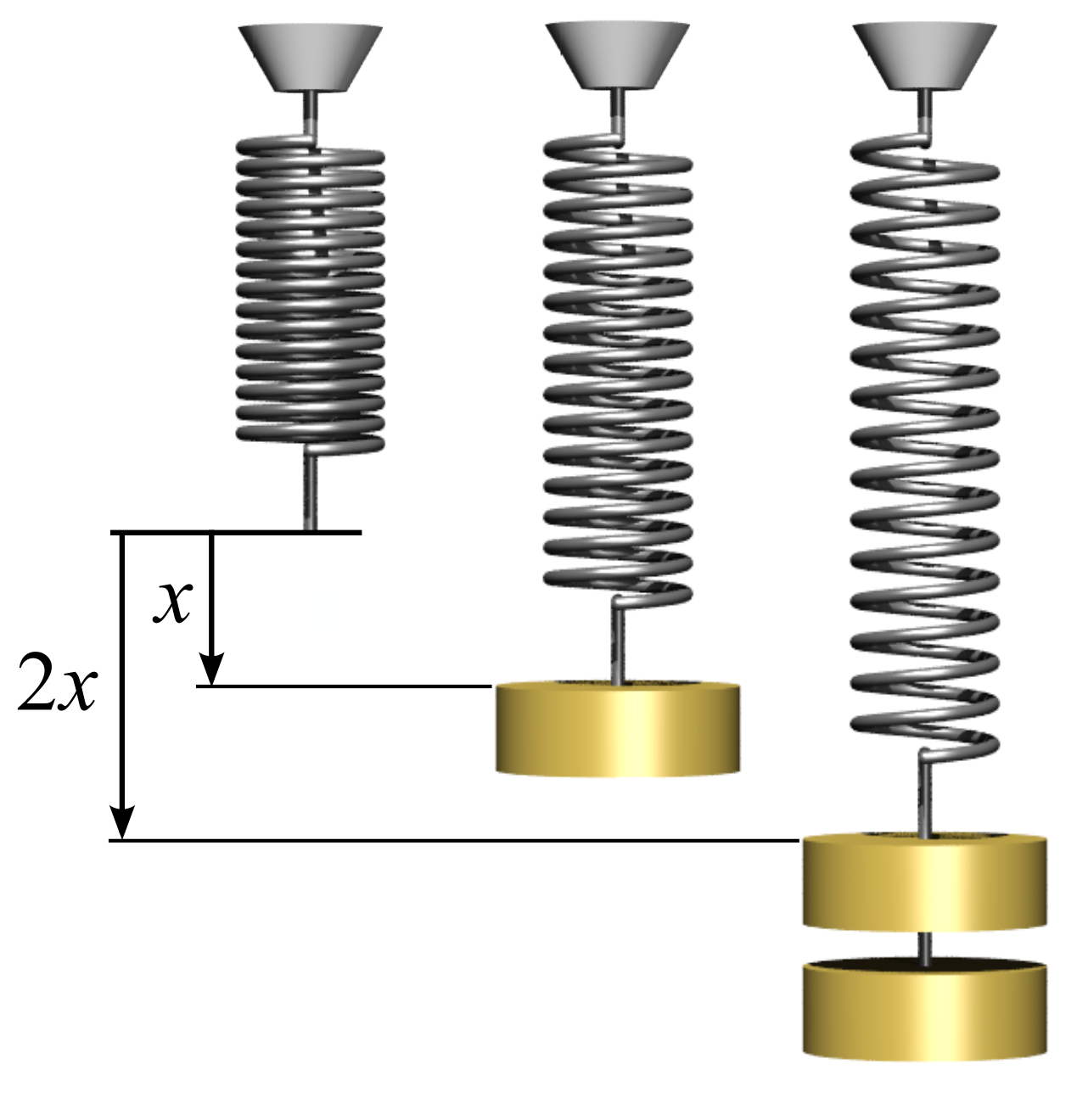
La legge di Hooke è una legge della fisica che afferma che la forza \(F\) necessaria per estendere o comprimere una molla di una quantità \(x\) scala linearmente rispetto a tale quantità, cioè
\begin{equation}
F = k\,x\,.\tag{3.2.1}
\end{equation}
\(k\;\left[\frac{\text{N}}{\text{m}}\right]\) prende il nome di rigidezza ed è un fattore costante e positivo caratteristico della molla, \(x\;\left[\text{m}\right]\) è l’allungamento che subisce la molla (nel caso di \(x\) negativo la molla subisce un accorciamento).
La legge prende il nome dal fisico britannico del XVII secolo Robert Hooke che rese pubblica per la prima volta la legge nel 1676 come un anagramma latino. Successivamente, nel 1678, pubblicò la soluzione del suo anagramma come: ut tensio, sic vis (l’estensione è proporzionale alla forza).
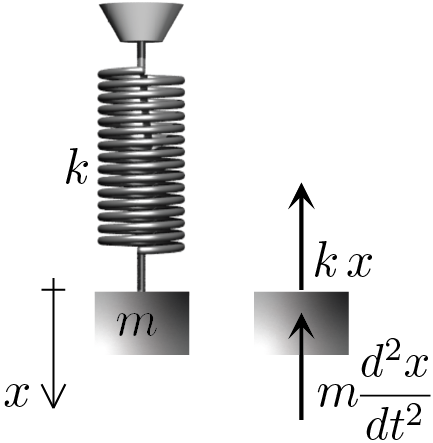
Al fine di evidenziare il concetto di energia elastica immagazzinata dalla molla per effetto dell’allungamento \(x\) si consideri il seguente schema meccanico dove sono state messe in evidenza tutte le forze che agiscono (per semplicità si supponga di effetuare l’esperimento in assenza di gravità 1
In effetti se si tenesse conto anche della gravità la natura dell’equazione risultante non cambiarebbe.
e di forze dissipative) su un corpo di massa \(m\) e vincolato da una molla di rigidezza \(k\text{.}\)
A causa dello spostamento \(x\) misurato a partire dalla posizione di equilibrio, il corpo è soggetto alla forza d’inerzia \(m\,\frac{d^2 x}{dt^2}\) e alla forza elastica \(k\,x\) dirette come indicato in figura. Per l’equilibrio del sistema si ha
L’equazione differenziale ottenuta caratterizza un sistema che, in meccanica, viene denominato oscillatore armonico semplice. La soluzione dell’equazione differenziale è descritta dalla funzione
dove \(\func{x}{0}\) e \(\func{\frac{dx}{dt}}{0}\) rappresentano le condizioni iniziali. \(\omega\) prende il nome di pulsazione e viene misurata in \(\left[\frac{\text{rad}}{\text{s}}\right]\text{.}\)
A scopo esemplificativo si riportano le istruzioni MATLAB® utilizzabili per il plottaggio della funzione sulla base dei seguenti dati: \(\omega = 2\pi\;\left[\frac{\text{rad}}{\text{s}}\right]\text{,}\)\(m=10\;\left[\text{kg}\right]\text{,}\)\(\func{x}{0}= 1 \; \left[\text{m}\right]\) e \(\func{\frac{dx}{dt}}{0}= 10 \; \left[\frac{\text{m}}{\text{s}}\right]\text{.}\)Listing3.2.4.
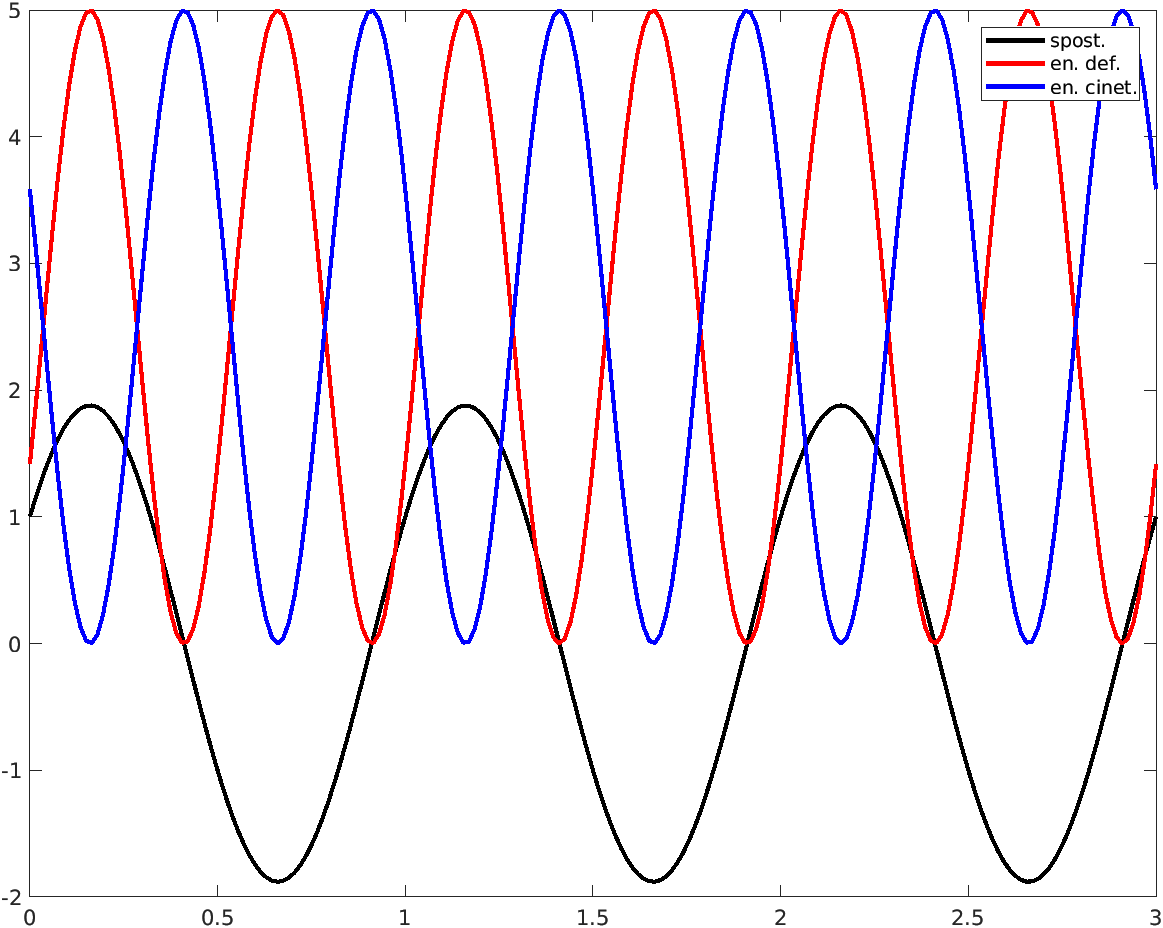
L’andamento perfettamente oscillatario della soluzione sempre rispetto agli stessi estremi viene determinato della conservazione dell’energia potenziale totale
evidenzia in forma grafica la continua trasformazione dell’energia di deformazione della molla in energia cinetica del corpo e viceversa. Energia di deformazione (colore rosso) che oscilla fra lo zero fra il valore massimo che si ha quando il valore assoluto dello spostamento (colore nero) è massimo, allo stesso istante la velocità è nulla. Al contrario l’energia cinetica (colore blu) è massima quando il valore assoluto dello velocità è massima, quando allo stesso istante lo spostamento è nullo.
Per concludere si osserva che l’energia elastica agisce come un potenziale per la forza elastica della molla in quanto quest’ultima può essere ottenuta per derivazione dell’energia, ovvero
\begin{equation*}
F = \frac{d}{dx}\left( \frac{1}{2}k\,x^2 \right) = k\, x\,.
\end{equation*}
Subsection3.2.1prova uniassiale a trazione o compressione
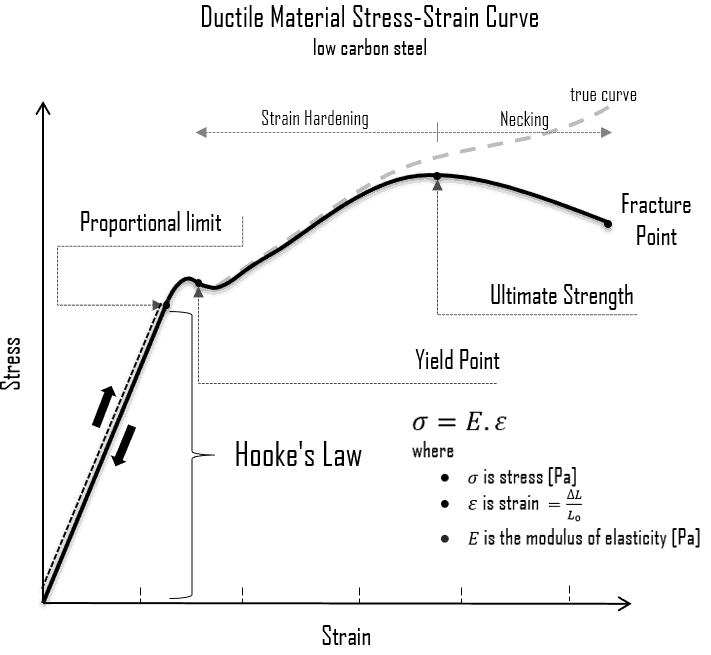
La seguente figura illustra il risultato di un prova di carico uniassiale effettuata su una barra di acciaio. Per risultato della prova si intende la curva riportata in figura, curva che rappresenta la risposta meccanica, ovvero il valore della tensione nel materiale, al crescere della deformazione applicata. È evidente come sia articolata e variabile la risposta del materiale e come sia non banale l’individuazione di un modello matematico/numerico in grado di riprodurre il risultato prodotto dalla prova di carico, risultato che può essere schematicamente riepilogato come segue (per l’acciaio, e in generale per i materiali metallici, quanto riportato in figura viene generalemente assunto come valido sia in regime di trazione e sia in regime di compressione).
Esiste un limite alla fase lineare (Proportional limit) superato il quale la risposta tende a mantenersi costante stazionando nella fase denominata di snervamento (Yield Point).
Successivamente comincia la fase di incrudimento (Strain Hardening) che termina con il raggiungimento del carico limite (Ultimate Strength) del materiale.
Il focus del presente capitolo è comunque soltanto la prima fase della risposta del materiale, fase che non solo è lineare ma anche elastica nel senso che è applicabile la legge di Hooke e quindi tra le uniche componenti di tensione e deformazione, \(\sigma\) e \(\varepsilon\text{,}\) presenti in una condizione uniassiale è legittimo assumere che intercorra il seguente legame proporzionale
Con il simbolo \(E\) si indica il modulo di Young che è una caratteristica specifica del materiale ed è misurabile con una prova di carico del tipo descritto in precedenza (banalmente \(E\) è dato dalla pendenza che la curva di risposta assume in fase elastica). Ricordando che la deformazione è adimensionale l’unità di misura utilizzata per \(E\) è identica a quella utilizzata per la tensione \(\sigma\text{.}\) Alcune esempi di unità di misura utilizzati sono i seguenti
Quanto osservato per la prova uniassiale a trazione si verifica anche nelle prove uniassiali che coninvolgono componenti tangenziali di tensione e di deformazione. Anche in questo caso esiste una prima parte della risposta che può essere descritta con la legge di Hooke. Cambia comunque il coefficiente di proporzionalità. In particolare si ottiene che il legame tra componente di tensione tangenziale \(\tau\) e componente di deformazione a taglio \(\gamma\) (si veda la (1.9.10)) può essere formulato come segue