Il termine vincolo viene utilizzato per indicare un dispositivo che limita le possibilità di movimento di un sistema di corpi. Un generico sistema, ad esempio un sistema di corpi rigidi, viene descritto mediante \(n\) parametri, \(q_1, \dots q_n\text{,}\) che prendono il nome di coordinate lagrangiane del sistema. In questi termini, la generica condizione di vincolo viene espressa, nella forma più generica, nel modo seguente:
Per gli sviluppi successivi è sufficiente considerare solo vincoli fissi (indipendenti dal tempo), bilateri (la condizione di vincolo si esprime mediante il segno di uguaglianza) e non monolateri (espressi mediante i segni di disegueglianza), olonomi (indipendenti dalle velocità) e non sclerolonomi (dipendenti dalle velocità) e privi di attrito (consentono completamente ciò che non vincolano), ovvero
La relazione appena scritta è in generale non lineare. Nel seguito si opererà nell’ambito di una cinematica del I\(^o\) ordine pertanto si opererà sempre con condizioni di vincolo di tipo lineare come di seguito descritto per i vincoli maggiormente utilizzati nelle applicazioni.
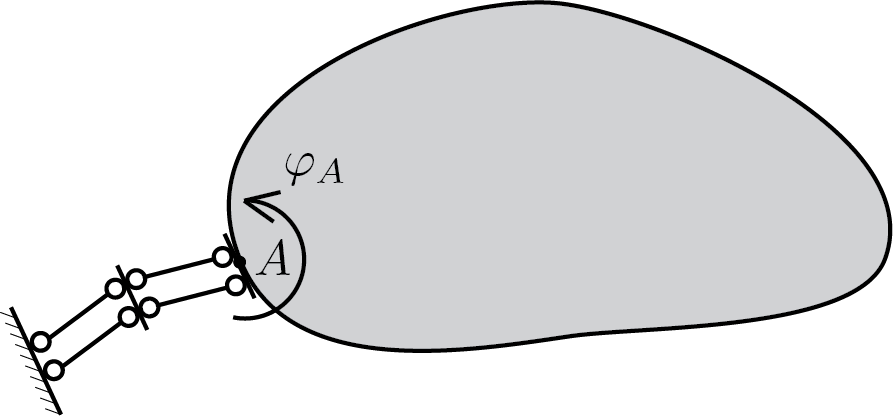
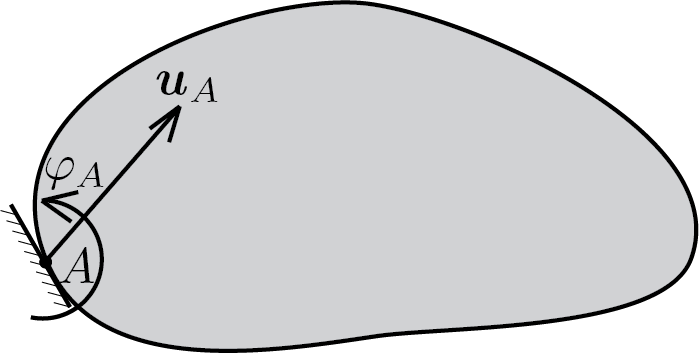
Nel caso di corpo rigido la rotazione non può variare da punto a punto e, pertanto, bloccare la rotazione in un punto vuol dire bloccarla su tutto il corpo. Detto in altro parole, per la cinematica di corpo rigido il punto di applicazione del vincolo non ha nessuna rilevanza.
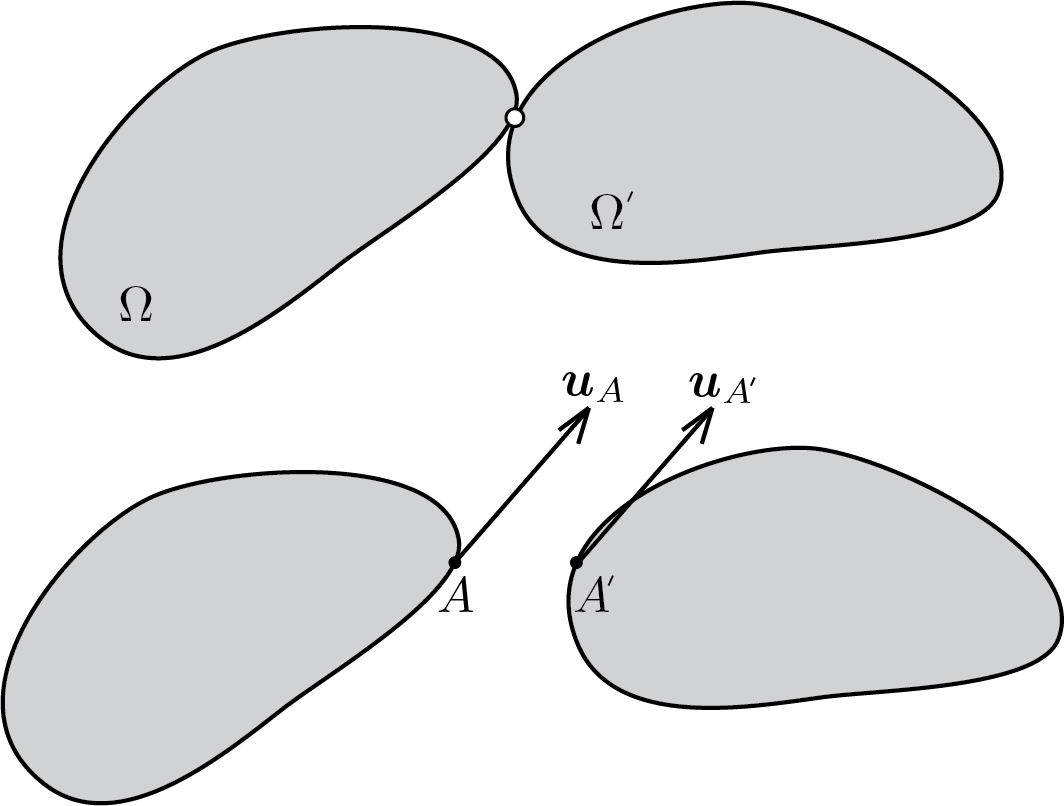
L’articolazione di due o più corpi rigidi può essere effettuata mediante dei dispositivi detti vincoli interni. A scopo esemplificativo, evitando di passare in rassegna tutti i possibili casi, si discute solo uno dei casi più ricorrenti.