Section1.5determinante del gradiente della trasformazione
Nelle sezioni precedenti sono state introdotti i tensori come operatori lineari associati a trasformazioni lineari definite nello spazio usuale \(\mathbb{R}^3\text{.}\) L’utilizzo della denominazione operatore lineare invece di matrice sta ad indicare che si parla un oggetto matematico con un significato più ampio di una matrice ma, comunque, i tensori condividono con le matrici tutte le proprietà e le operazioni algebriche di base. Pertanto nel seguito, parlando di matrici, verranno riprese alcune proprietà ed operazioni, quale ad esempio il calcolo del determinante, ricollocandole nel contesto della descrizione cinematica dei corpi.
Quanto descritto nella precedente video lezione può essere riepilogato come segue.
Il determinante è un numero reale che costituisce il fattore di scala delle aree, nel caso di trasformazioni 2D, o dei volumi, nel caso trasformazioni 3D.
Da questa prospettiva un determinante nullo è associato a trasformazioni che scalano a zero aree o volumi descritti nello spazio iniziale a cui viene applicata la trasformazione. Ad esempio in 2D, il determinante è zero se tutti i punti dello spazio di partenza sono mappati su una linea o, nel caso più estremo, su un singolo punto. Nel caso 3D, una trasformazione ha determinante nullo se mappa i punti in un piano, ovvero in una retta o in un singolo punto. In questi casi le colonne della matrice associata alla trasformazione sono linearmente dipendenti.
Il determinante può anche essere negativo perché porta con se anche l’informazione relativa ad un eventuale cambio di orientazione dell’area o del volume di partenza. Questo avviene quando i trasformati dei vettori della base non rispettano la regola della mano destra.
Subsection1.5.1formula di trasformazione di elementi di volume
Dato l’elemento di volume \(dV=dX_1 dX_2 dX_3\) appartenente alla configurazione di riferimento \(\body_0\text{,}\) da esso è possibile valutare il corrispondente elemento di volume \(dv = dx_1 dx_2 dx_3\) relativo alla configurazione corrente \(\body\text{.}\) Ovvero
\begin{equation}
dv = \func{J}{\vec{X}}\,dV\,,\tag{1.5.1}
\end{equation}
La disegueglianza evidenzia il rispetto delle seguenti condizioni: (i) per l’impenetrabilità della materia non si possono ammettere trasformazioni caratterizzate da \(\func{J}{\vec{X},t} < 0\text{;}\)(ii) il rapporto di trasformazione volumetrica \(\func{J}{\vec{X}}=dv/dV\) non può essere nullo per qualsiasi punto \(\vec{X}\in\body_{0}\text{.}\) È possibile definire anche il rapporto volumetrico inverso ovvero
calcolo del determinate di trasformazioni e relativa verifica di ammissibilità.
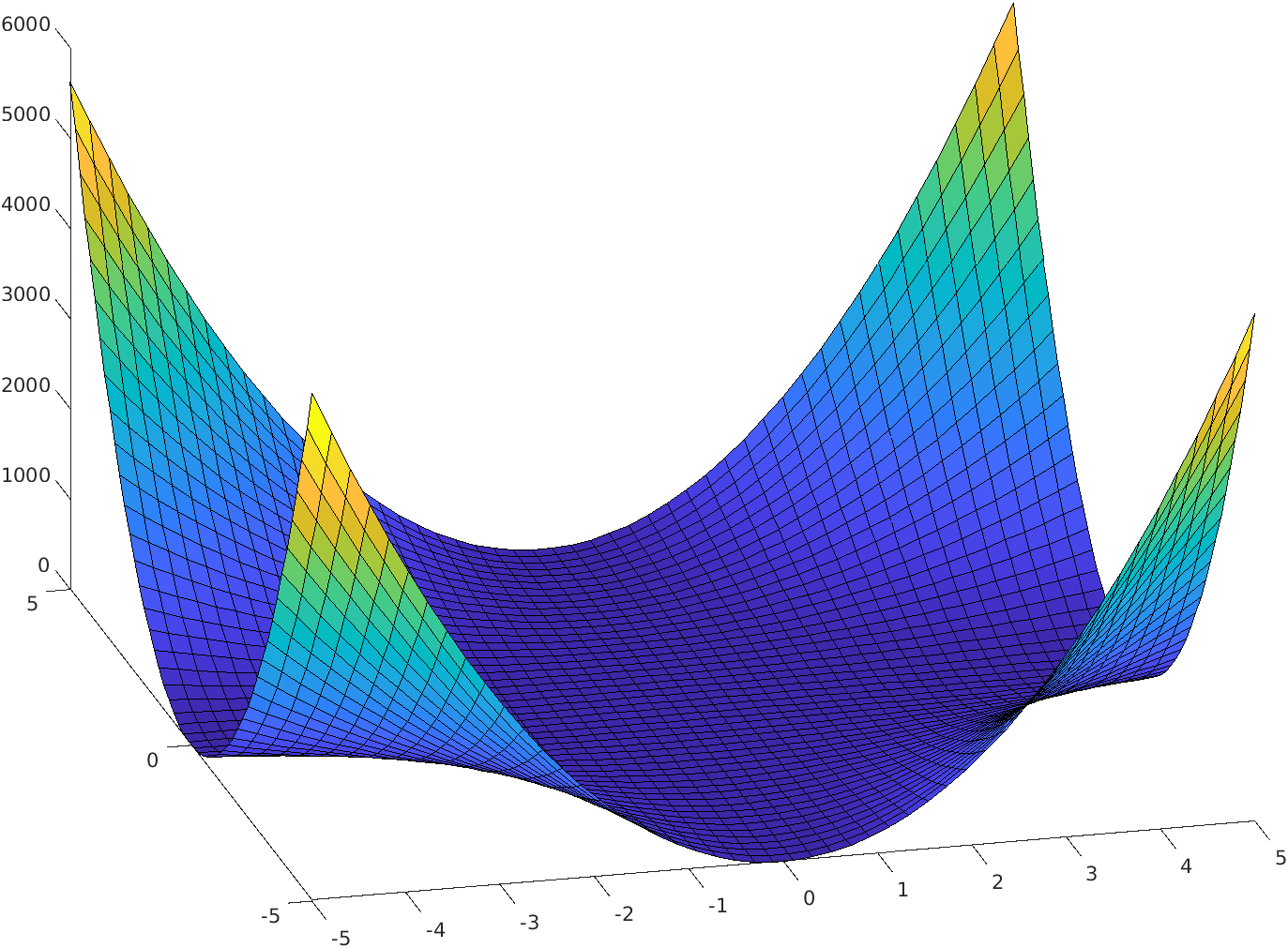
Per le trasformazioni bidimensionali considerate anche negli esempi precedenti si riportano le istruzioni MATLAB® per il calcolo del determinante e per la verifica di ammissibità della trasformazione. Si ricava anche un plottaggio del valore del determinante sul dominio definito da \(-5 < X_1 < 5\text{,}\)\(-5 < X_2 < 5\text{.}\)
Analoghe istruzioni possono essere individuate anche per le Trasformazioni 2, 3 e 4 che verificano anch’esse la condizione di ammissibilità essendo caratterizzate da un determinante costante e maggiore di zero.
con il quale si può verificare che lungo gli assi coordinati \(X_1 = 0\) e \(X_2 = 0\) la trasformazione ha determinante nullo e quindi non è ammissibile (si rammenti a riguardo la presenza delle cuspidi nei plottaggi mostrati in Figure 1.3.3).
dove \(d\vec{s} = ds \vec{n}\) e \(d\vec{S} = dS \vec{N}\) rappresentano elementi vettoriali relativi a aree infinitesime, rispettivamente, nella configurazione corrente e in quella di riferimento. \(d\vec{x}\) è il trasformato del segmento elementare \(d\vec{X}\text{.}\) Effettuando alcuni semplici passaggi
fomula nota come Formula di Nanson e che lega l’elemento vettoriale di area \(d\vec{s}\) appartenente alla configurazione corrente \(\body\) al corrispettivo elemento vettoriale di area \(d\vec{S}\) appartenente alla configurazione di riferimento \(\body_0\text{.}\)