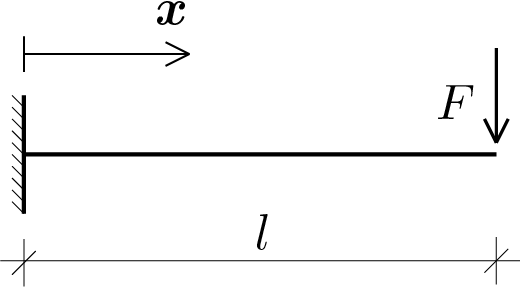
Equazione differenziale del 4\(^o\) ordine a cui occorre associare le condizioni al contorno che, nel caso in esame, sono di tipo cinematico all’estremo \(x=0\) e di tipo statico all’estremo \(x=l\text{:}\)
Le seguenti istruzioni MATLAB® consentono il calcolo della soluzione \(\func{w}{x}\) e del relativo momento flettente \(\func{M}{x}\text{.}\)Listing3.8.2.
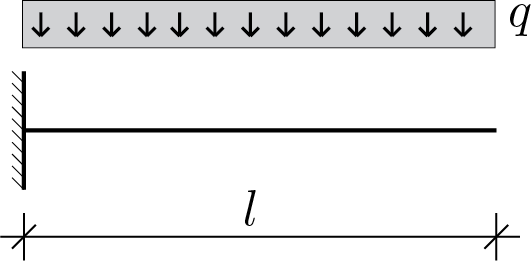
dove il carico ripartito ha un valore costante. Anche in questo caso le condizioni al contorno sono di tipo cinematico all’estremo \(x=0\) e di tipo statico all’estremo \(x=l\text{:}\)
Le sopra elencate equazioni, di equilibrio e relative condizioni al contorno, sono formulabili in MATLAB® come segue consentendo il calcolo della soluzione \(\func{w}{x}\) e del relativo momento flettente \(\func{M}{x}\text{.}\) Si forniscono anche le istruzioni per il plottaggio delle due funzioni. Listing3.8.5.
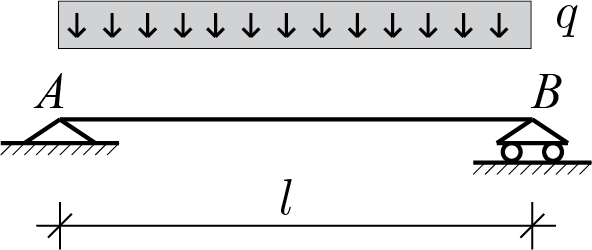
La soluzione del problema si ottiene sulla base della stessa equazione di equilibrio utilizzata nell’esempio precedente. Occore modificare soltanto le condizioni al contorno che per la trave appoggiata diventano
Analogamente anche le istruzioni MATLAB® per il calcolo della soluzione si modificano solo nella parte riguardante le condizioni al contorno. Listing3.8.7.