La soluzione del problema elastico sotto condizioni del tutto generiche pone difficoltà difficilmente sormontabili. Soltanto effettuando opportune semplificazioni, come ad esempio fatto per i solidi prismatici (geometrie semplici) e sotto l’azione di carichi di tipo ben preciso, si riesce ad ottenere una soluzione analitica del problema assegnato.
Le considerazioni precedenti e la necessità di affrontare ingegneristicamente problematiche strutturali riguardanti solidi che dal punto di vista geometrico sono modellabili mediante descrizioni monodimensionali o bidimensionali, hanno portato allo sviluppo di svariati modelli strutturali. Tali modelli consentono di risolvere con un grado di approssimazione accettabile diverse problematiche altrimenti non affrontabili mediante strumenti sia analitici e sia numerici.
Nel seguito vengono presentati due modelli di trave, teso ed inflesso, che costituiscono una riduzione al monodimensionale delle soluzioni trovate per i solidi prismatici semplicemte teso ed inflesso, Table 3.4.6. In particolare si procederà mostrando come sia possibile descrivere la componente significativa della deformazione, la \(\varepsilon_{33}\text{,}\) riferendosi solo alla linea d’asse della trave. La componente \(\varepsilon_{33}\) è quella significativa perché costituisce l’unica componente di deformazione che determina il valore del lavoro interno del solido prismatico, infatti nei due casi esaminati si ha che
essendo chiaro a quali componenti ci si riferisce. Quindi la finalità principale è ottenere una descrizione dell’energia interna del modello monodimensionale equivalente all’energia interna del soluzione 3D assunta come riferimento.
Inoltre per i problemi esaminati l’asse della trave si muove rimanendo nel piano individuato dagli assi \(X_3\) ed \(X_2\) e per tale motivo la trattazione può essere effettuata nel piano e si parlerà di modelli di trave piana.
Subsection3.5.2il riferimento dato dalla linea d’asse
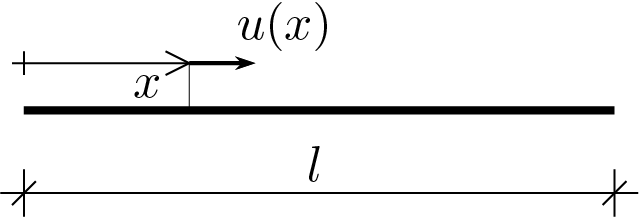
Nel caso del solido prismatico semplicemente teso l’asse della trave si deforma come indicato in Figura, ovvero subisce un semplice allungamento o accorciamento. In Figura viene anche evidenziata la notazione che correntemente si utilizza per tale modello monodimensionale.
Prendendo quindi come riferimento l’asse della trave potremo calcolare la componente di deformazione \(\varepsilon_{33}\text{,}\) qui indicata semplicemente come \(\varepsilon\text{,}\) derivando semplicemente la variabile di spostamento lungo l’asse
\begin{equation}
L_i = \int_{l} N \varepsilon \,dx\,.\tag{3.5.3}
\end{equation}
La quantità introdotta
\begin{equation}
N =\int_{A} \sigma \, dS\,,\tag{3.5.4}
\end{equation}
è l’ente statico che nella riduzione monondimensionale compie lavoro sulla deformazione. \(N\) viene denonominata sforzo normale ed ha le dimensioni di una forza, \(\left[\text{F}\right]\text{.}\)
Relazione che evidenzia come il coefficiente di proporzionalità che definisce il legame fra \(N\) ed \(\varepsilon\) sia dato dal prodotto fra il modulo di Young del materiale e l’area della sezione della trave.
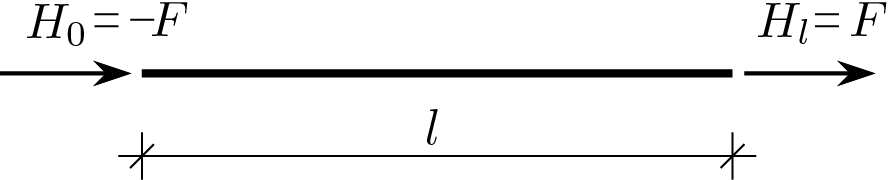
Fino a questo punto la riduzione al monodimensionale è rimasta strettamente aderente alla soluzione 3d da cui si è partiti. Se si continuasse sulla stessa falsa riga anche per i carichi esterni si otterrebbe la seguente situazione
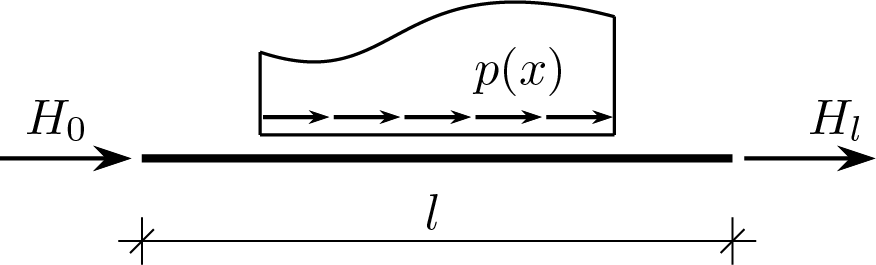
Con la definizione dei carichi esterni ammissibili per il modello di trave si fa la scelta invece di ampliare l’utilizzo del modello anche a casi che in generale non sono compresi nella soluzione del solido prismatico semplicemente teso. In particolare, come mostra la Figura seguente,
si introduce il carico per unità di lughezza \(\func{p}{x}\text{,}\) funzione generica dipendente dall’ascissa \(x\text{,}\) e le forze concetrate di estremità, comunque attese, sono in generale differenti. Il lavoro esterno assume quindi la seguente epsressione
Inoltre, a differenza della soluzione 3d di riferimento, la scelta dei carichi ammissibili determina per \(\func{u}{x}\) un andamento non non più limitato alla sola variabilità lineare. Anche lo sforzo normale e la deformazione assiale, costanti nella soluzione di riferimento, diventano anch’essi funzioni generiche del tipo \(\func{N}{x}\) e \(\func{\varepsilon}{x}\text{.}\)
Subsection3.5.6principio dei lavori virtuali ed equazioni di equilibrio
A questo punto la definizione del modello è praticamente completa. Manca la definizione delle equazioni di equilibrio alle quali si può arrivare attraverso il principio dei lavori virtuali formulabile come segue
La relazione appena scritta, dove si è tralasciato di esplicitare le dipendenze dalla variabile \(x\text{,}\) può essere manipolata effettuando i seguenti passaggi
Per quanto riguarda le condizioni al contorno si precisa che su ogni estremo si può assegnare o una condizione di tipo statico o una di tipo cinematico.
Le equazioni di equilibrio possono essere manipolate al fine di ottenere un’espressione in cui compaia direttamente lo spostamento \(\func{u}{x}\) come incognita. In particolare effettuando i seguenti passaggi
\begin{align*}
\frac{dN}{d x} + p \amp= 0\\
\frac{d}{d x}\left(EA\,\varepsilon\right) + p \amp= 0\\
\frac{d}{d x}\left(EA\,\frac{du}{dx}\right) + p \amp= 0
\end{align*}
si ottiene
\begin{equation}
EA\,\frac{d^2u}{dx^2} + p = 0\,.\tag{3.5.21}
\end{equation}