La trasformazione \(\vec{\chi}\) che è stata introdotta per descrivere il moto di un corpo è del tutto generica pertanto non necessariamente è lineare. Ma vedremo come tale caratteristica, la linearità, gioca comunque un ruolo fondamentale perché, anche se generica, \(\vec{\chi}\) viene descritta localmente mediante una sua linearizzazione, linearizzazione che si basa sulla nozione di differenziale di una funzione.
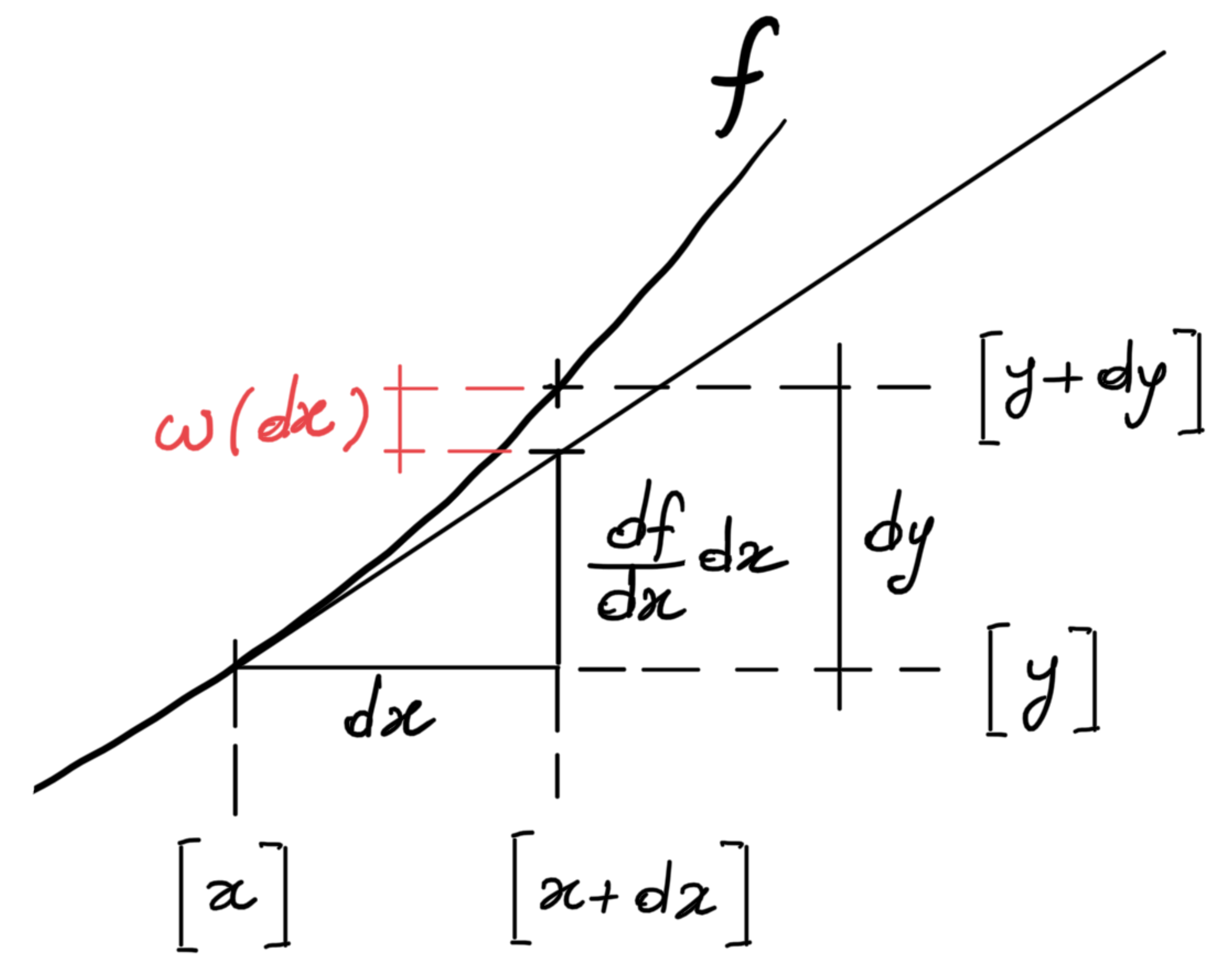
Al fine di richiamare, in maniera semplice, l’idea che sta alla base delle operazioni di linearizzazione, tale processo viene illustrato nello schema seguente per una funzione reale dipendendente da una sola variabile.
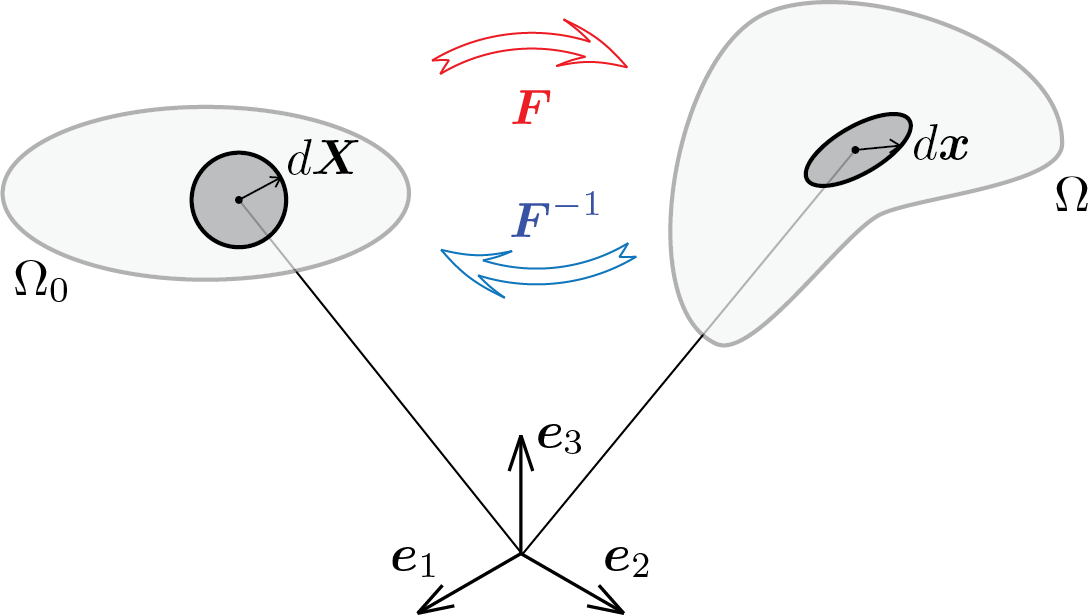
Una generalizzazione rigorosa dell’equazione (1.3.1) richiederebbe un approfondimento che esula dalle finalità introduttive del presente trattazione. Si riporta quindi direttamente il risultato finale che fornisce il differenziale \(d\vec{x}\) relativo alla configurazione corrente in funzione del differenziale \(d\vec{X}\) relativo alla configurazione di riferimento. A tal fine si premette una scrittura estesa della equazione (1.2.1)
Tale risultato evidenzia come il passaggio da \(d\vec{X}\) a \(d\vec{x}\) avvenga mediante una trasformazione lineare rappresentata dalla matrice \(\mat{F}\) che contiene, punto per punto, tutta l’informazione necessaria per caratterizzare la deformazione. \(\tens{F}\) prende il nome di gradiente della trasformazione con il quale si può esprimere in forma compatta il legame fra i differenziali \(d\vec{X}\) e \(d\vec{x}\)
Quanto ottenuto per la strasformazione \(\vec{\chi}\) vale anche la sua inversa \(\vec{\chi}^{-1}\text{,}\) pertanto si può stabilire il seguente legame inverso fra i differenziali \(d\vec{X}\) e \(d\vec{x}\)
Tipicamente la valutazione del gradiente della trasformazione inversa non passa attraverso la scrittura esplicita di \(\vec{\chi}^{-1}\) ma si effettua calcolando l’inverso di \(\tens{F}\) per il quale deve essere assicurata l’invertibilità.
valutazione del gradiente (trasformazioni lineari).
Nel caso della Trasformazione 1 già discussa in precedenza esplicitiamo la dipendenza delle singole componenti di \(\vec{x}\) dalle componenti di \(\vec{X}\text{:}\)
Il fatto che in questo caso si ottenga un gradiente costante e coincidente con la matrice \(\mat{M_{\chi}}\) associata alla trasformazione non è casuale ma dipende dalla linearità della trasformazione in esame: necessariamente una sua linearizzazione coincide con la trasformazione data. Risultato analogo si otterrebbe anche per le altre trasformazioni lineari considerate negli esempi precedenti.
valutazione del gradiente (trasformazioni non lineari).
Nel caso di trasformazioni non lineari non è possibile identificare una matrice associata alla trasformazione ma, localmente, il gradiente della trasformazione si comporta come una trasformazione lineare. Si consideri, per esempio, la trasformazione così definita
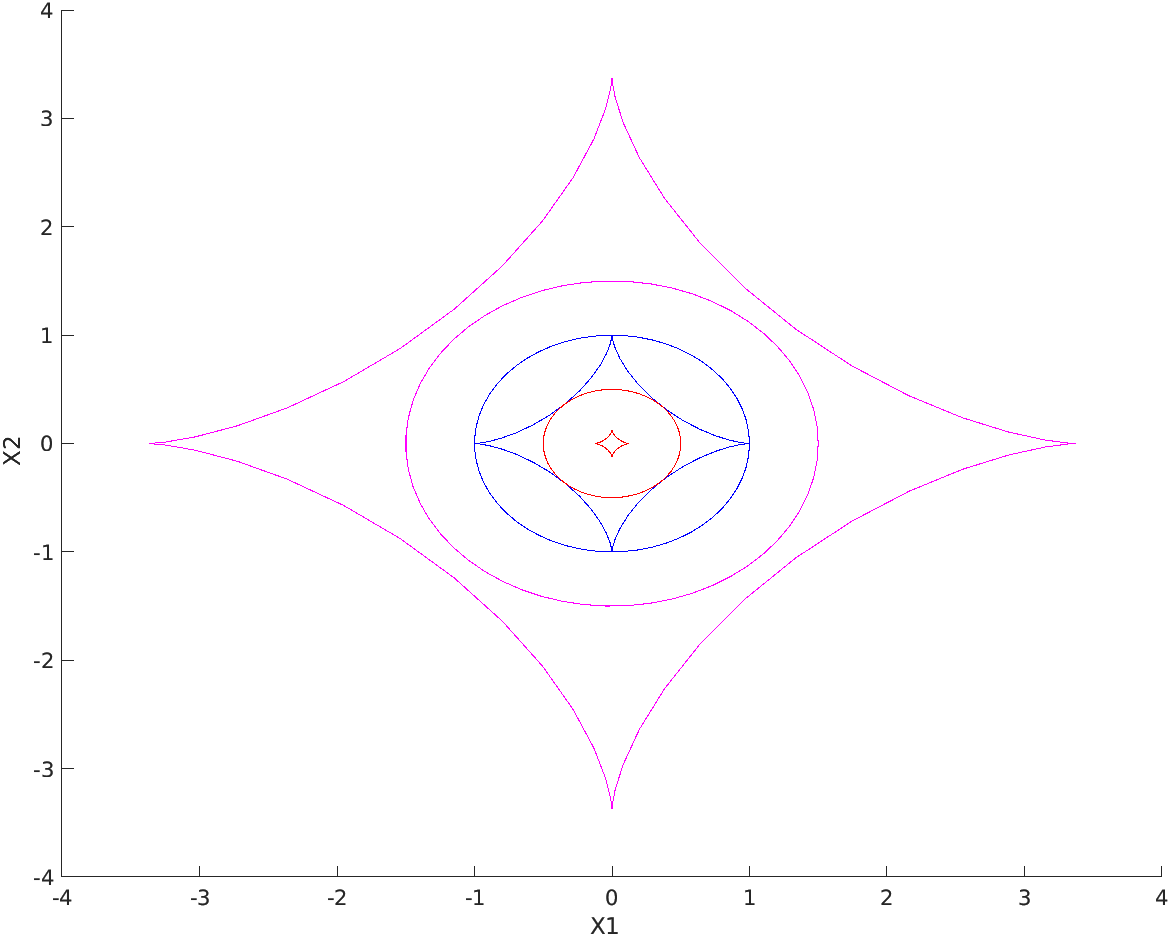
Al fine di visualizzare come agisca la trasformazione assegnata si considerano, nel dominio piano \((X_1, X_2)\text{,}\) tre circonferenze di raggio \(0.5\text{,}\)\(1.0\) e \(1.5\) e su queste si applichi la trasformazione non lineare assegnata. Si riportano le istruzioni MATLAB® per il calcolo e il plottaggio delle circonferenze nella configurazione di riferimento e in quella corrente. Listing1.3.2.
$ N=60;
angle=linspace(0,2*pi,N);
radius=1.0;
c1X=radius*cos(angle);
c1Y=radius*sin(angle);
c1x=c1X.^3;
c1y=c1Y.^3;
radius=0.5;
c2X=radius*cos(angle);
c2Y=radius*sin(angle);
c2x=c2X.^3;
c2y=c2Y.^3;
radius=1.5;
c3X=radius*cos(angle);
c3Y=radius*sin(angle);
c3x=c3X.^3;
c3y=c3Y.^3;
hold on
% circonferenza (r=1) con deformata
plot(c1X,c1Y,'b-')
plot(c1x,c1y,'b-')
% circonferenza (r=0.5) con deformata
plot(c2X,c2Y,'r-')
plot(c2x,c2y,'r-')
% circonferenza (r=1.5) con deformata
plot(c3X,c3Y,'m-')
plot(c3x,c3y,'m-')
Istruzioni che consentono di ottenere la seguente figura dove le tre circonferenze, nelle configurazioni di riferimento e corrente, sono rappresentate con i colori rosso per il raggio \(0.5\text{,}\) blu per il raggio \(1.0\) e magenta per il raggio \(1.5\text{.}\)
Per esercizio e per confrontare la trasformazione non lineare esaminata con più semplici trasformazioni lineari, si suggerisce di effetuare gli stessi calcoli per le Trasformazioni 2, 3 e 4 discusse nelle sezioni precedenti.
Nell’esempio precedente sono da segnalare le cuspidi sulle configurazioni ottenute applicando la trasformazione. Si può dire qualcosa a riguardo? La valutazione del gradiente sui punti del cerchio che vengono mappati sugli apici delle cuspidi consentirebbe di fare un ipotesi su cosa avvenga in questi punti. Elementi di valutazione su tale aspetto verranno forniti in seguito.
Introducendo il gradiente della deformazione \(\tens{F}\) abbiamo fatto conoscenza con una categoria di oggetti matematici che vengono denominati tensori del secondo ordine o, semplicemente, tensori, essendo superfluo specificare l’ordine dei tensori che ricorrono più spesso nella meccanica dei solidi. Certamente tale incontro può essere causa di disorientamento, specialmente se si cerca anche di dare una definizione dei tensori nella forma più generale possibile. Pertanto si darà la definizione più correntemente utilizzata in Meccanica dei solidi, definizione anche abbastanza scontata rispetto a quanto detto finora a proposito di trasformazioni lineari.
Un tensore del secondo ordine, che in genere indicheremo con lettere maiuscole ed in grassetto (ad esempio \(\tens{A}\text{,}\)\(\tens{B}\text{,}\)\(\tens{C}\text{,}\)\(\dots\) ), è una trasformazione lineare che associa ad un generico vettore \(\vec{u}\) un altro vettore \(\vec{v}\text{.}\) Tale operazione di associazione viene indicata abitualmente come segue