Section5.9calcolo e diagrammi delle sollecitazioni
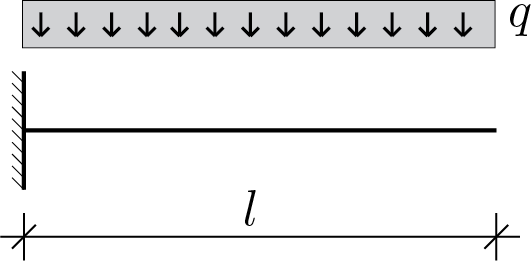
L’analisi statica presentata nelle sezioni precedenti consente di valutare le reazioni vincolari per un sistema isostatico. A partire da questa informazione e utilizzando gli integrali generali (5.8.13), (5.8.14) e (5.8.15) è possibile procedere con il calcolo delle sollecitazioni per sistemi di travi soggetti a forze/coppie generiche e carichi ripartiti al più costanti (per carichi ripartiti di tipo generico occorre utilizzare le (5.8.10), (5.8.11) e (5.8.12)).
La procedura di calcolo delle sollecitazioni verrà illustrata discutendo alcuni esempi ed utilizzando MATLAB® per lo svolgimento dei calcoli richiesti e la visualizzazione dei risultati. Data la semplicità degli schemi considerati il calcolo esplicito delle reazioni vincolari viene omesso.
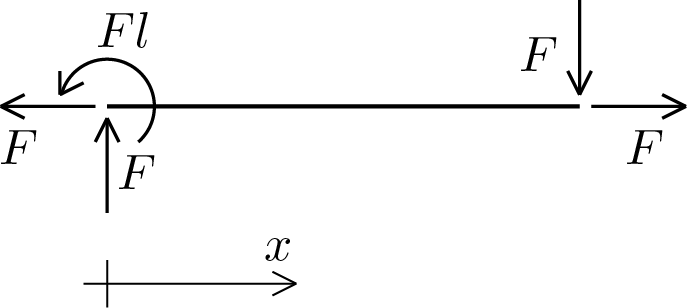
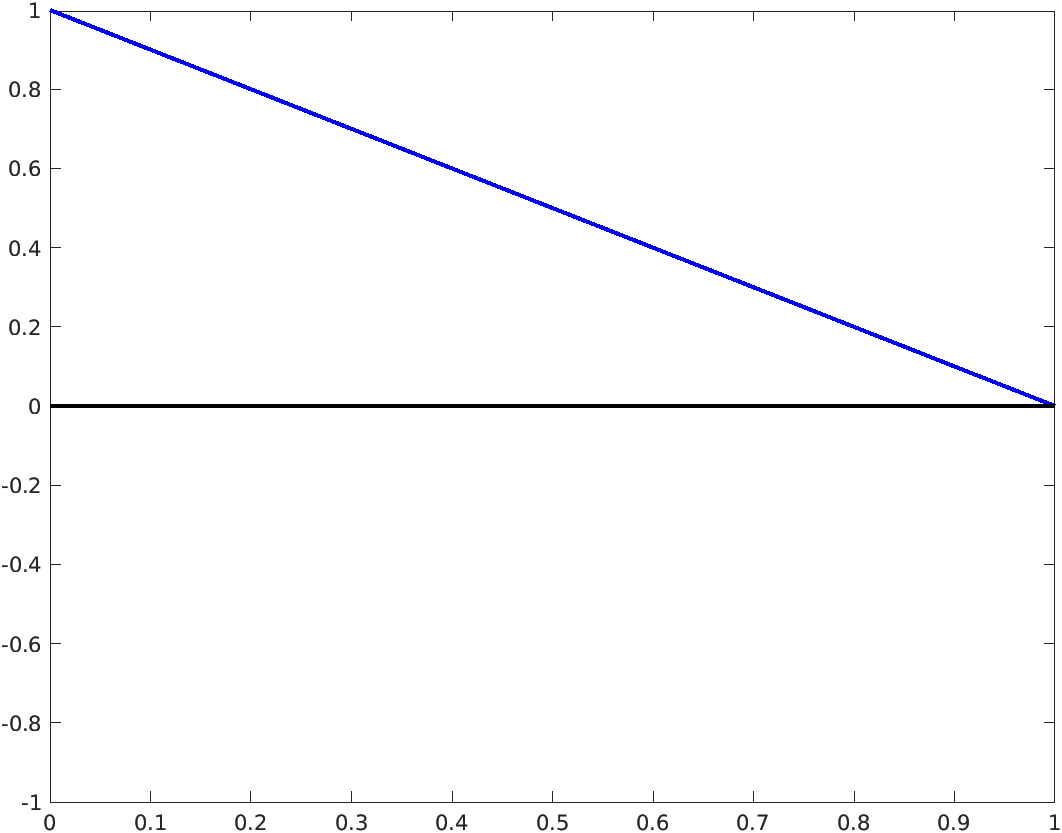
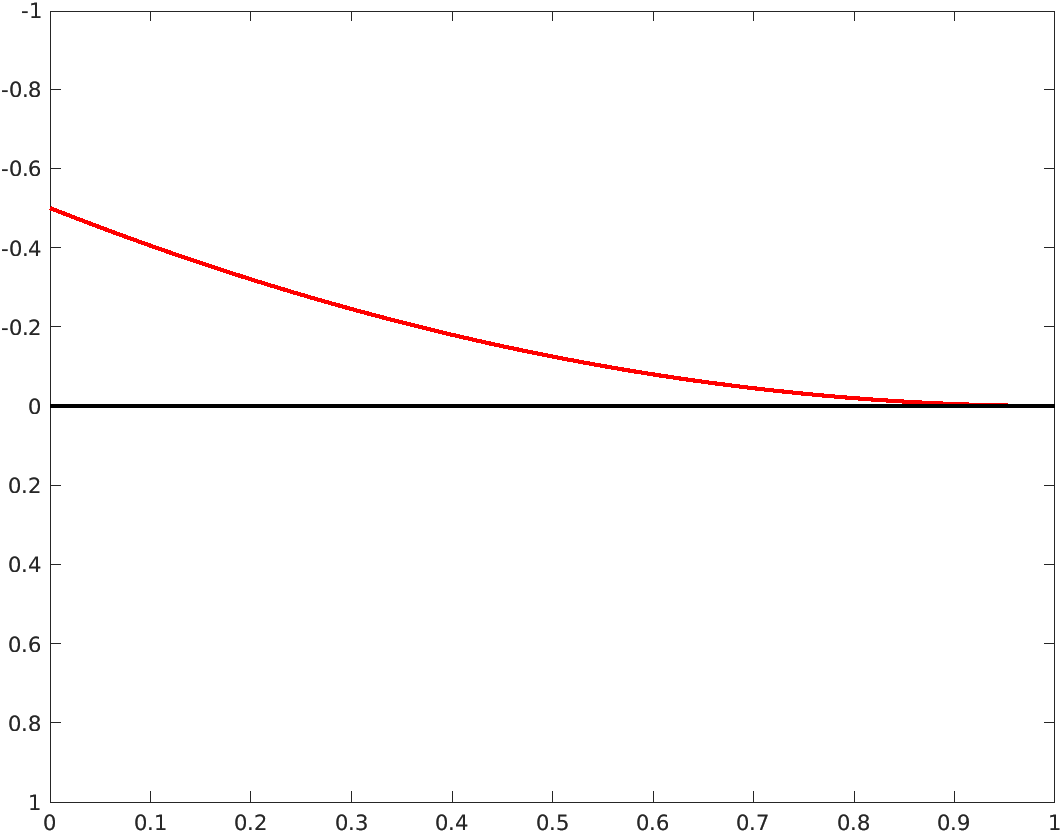
Utilizzando quindi gli integrali generali si ottenendo le seguenti espressioni delle componenti di sollecitazione in funzione dell’ascissa \(x\) posta lungo l’asse della trave
\begin{equation*}
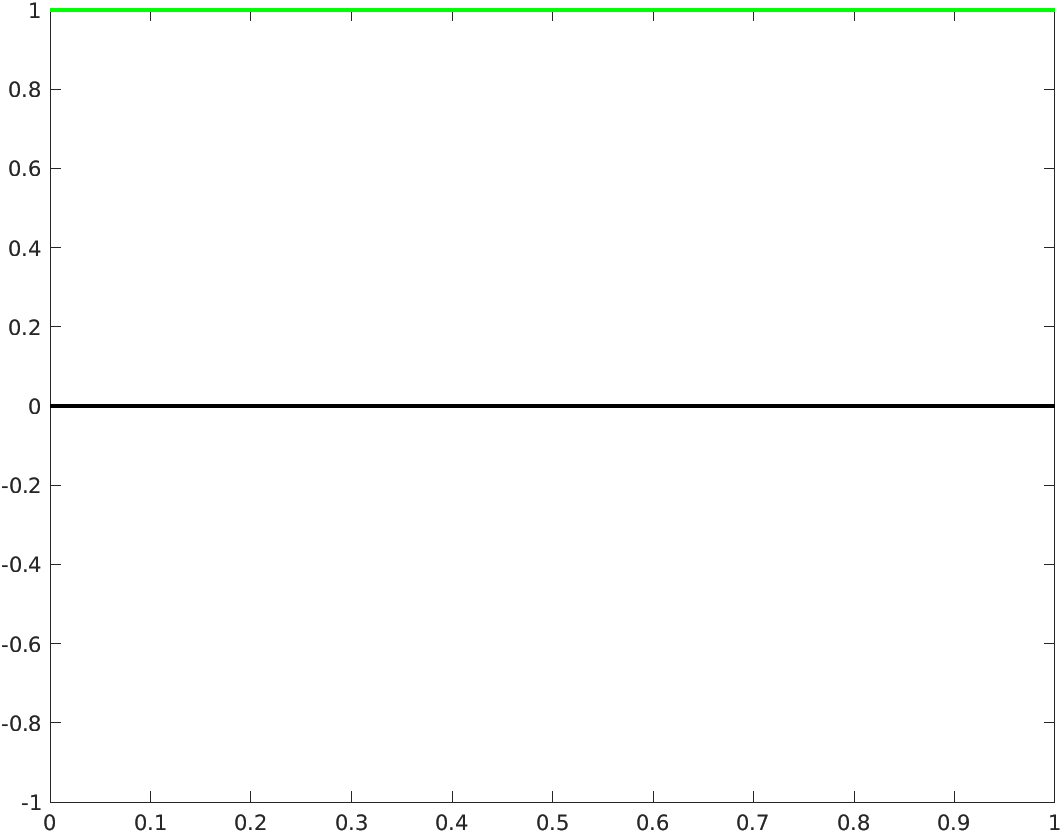
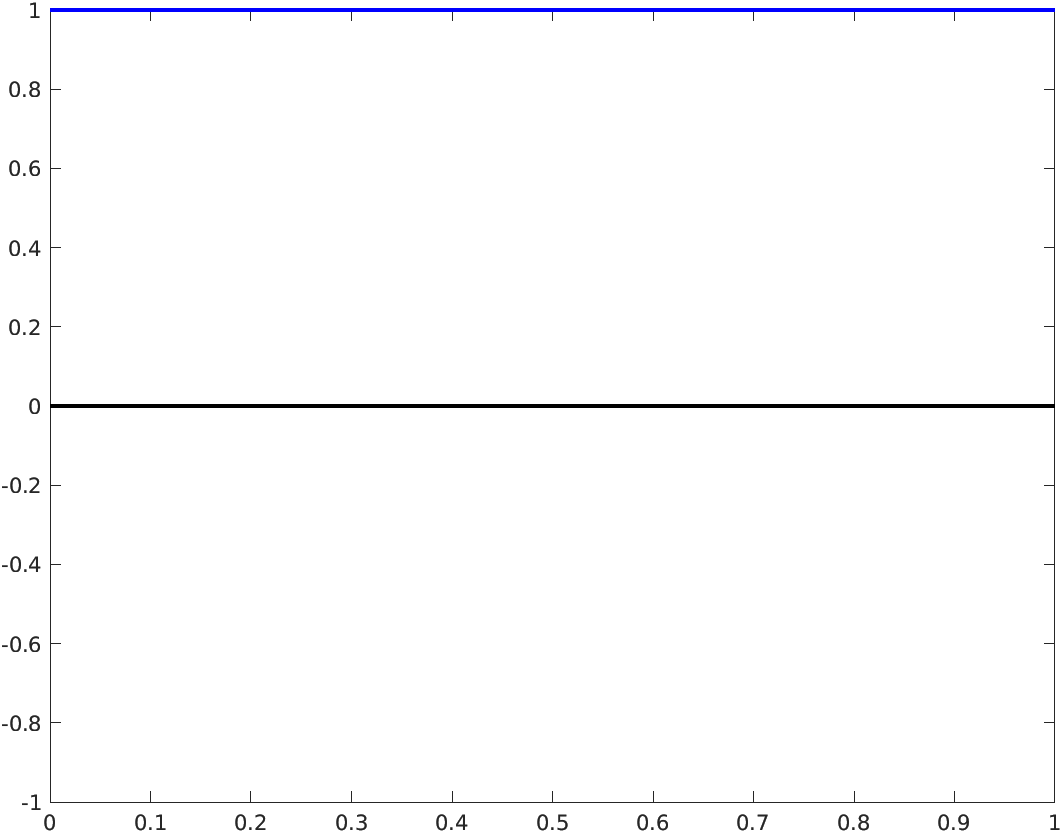
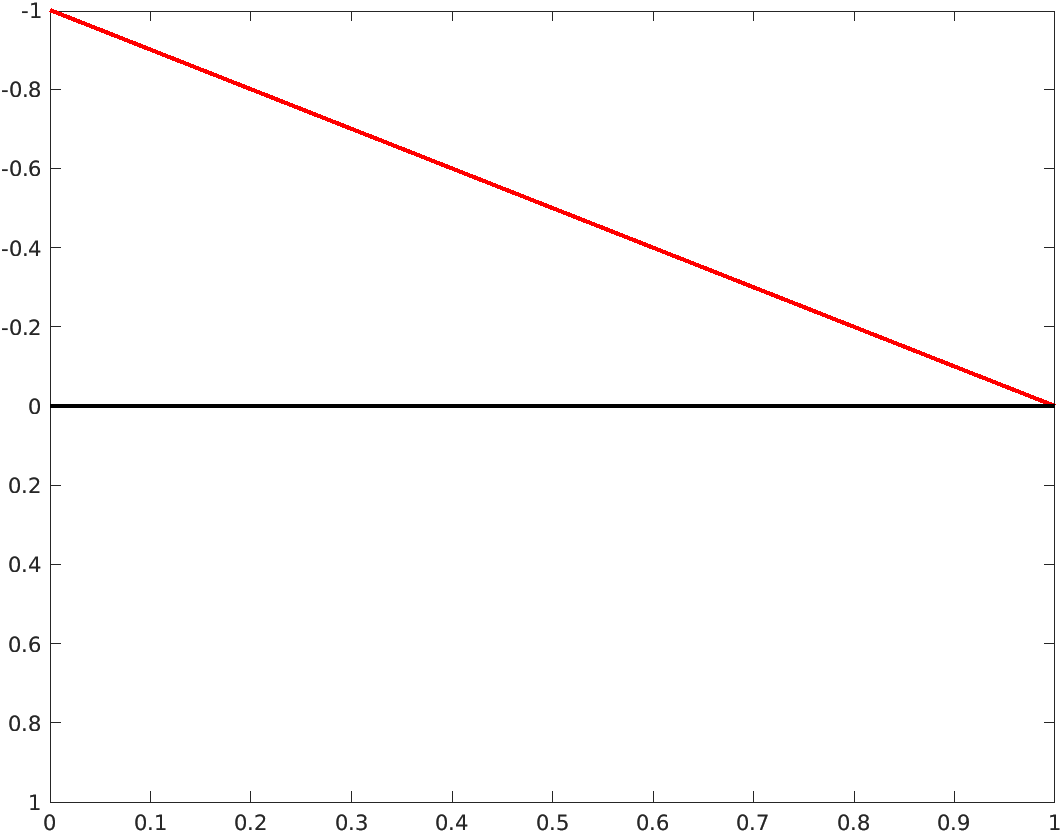
N(x) = F\,,\quad T(x) = -F\,,\quad M(x) = F l - F\,x\,.
\end{equation*}
Informazione utilizzabile nella scrittura degli integrali generali (5.8.13), (5.8.14), (5.8.15), ed ottenere la seguente espressione delle sollecitazioni lungo l’asse della trave.
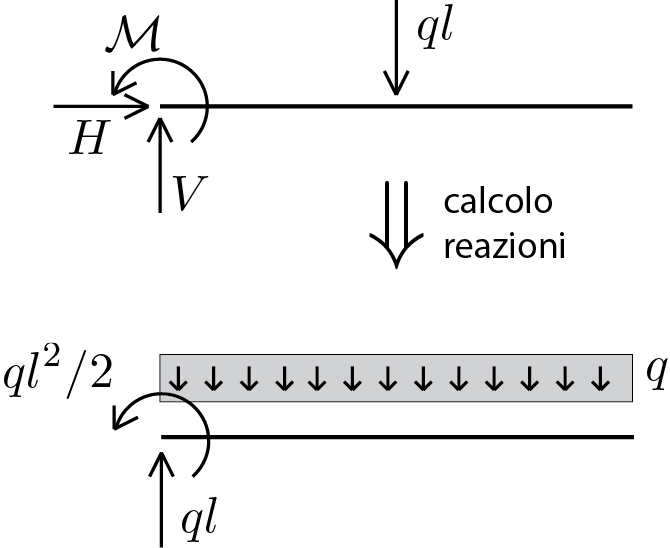
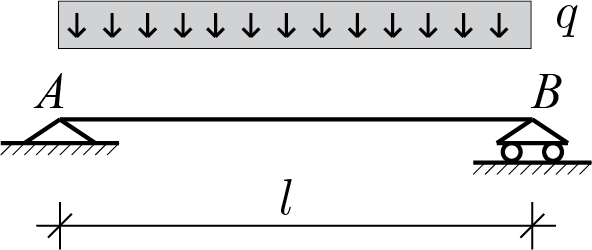
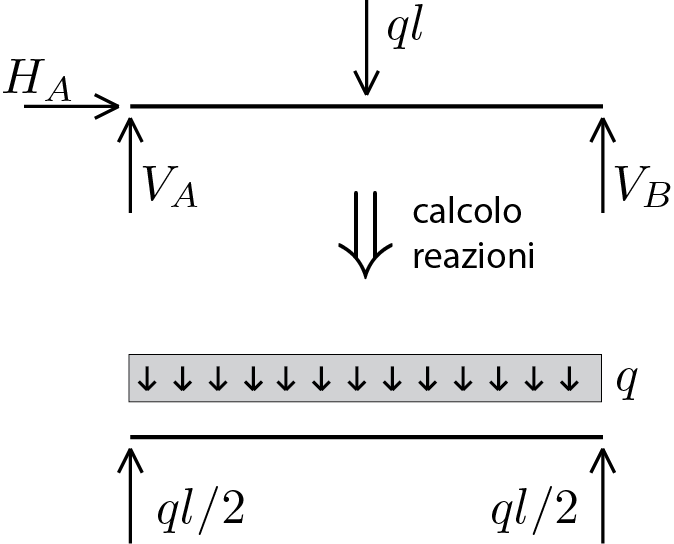
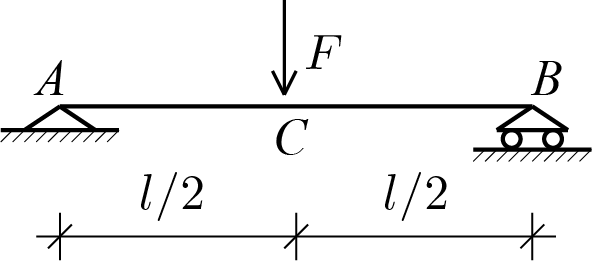
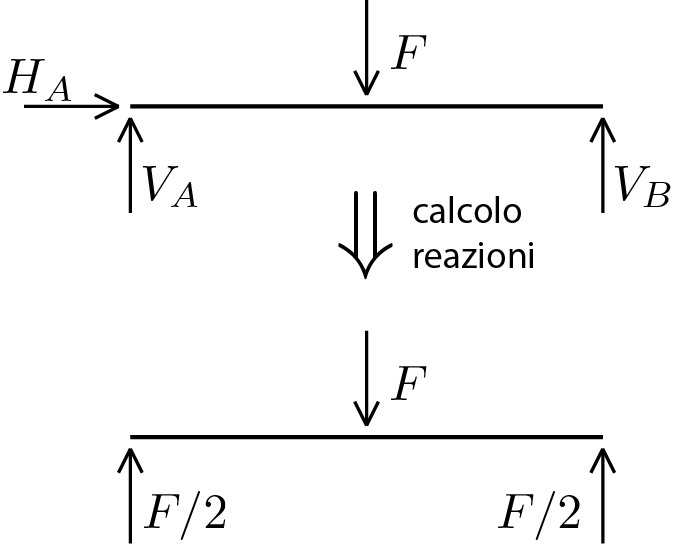
Si riporta anche in questo caso il diagramma di corpo libero utilizzato per il calcolo delle reazioni vincolari insieme al risultato ottenuto dal calcolo.
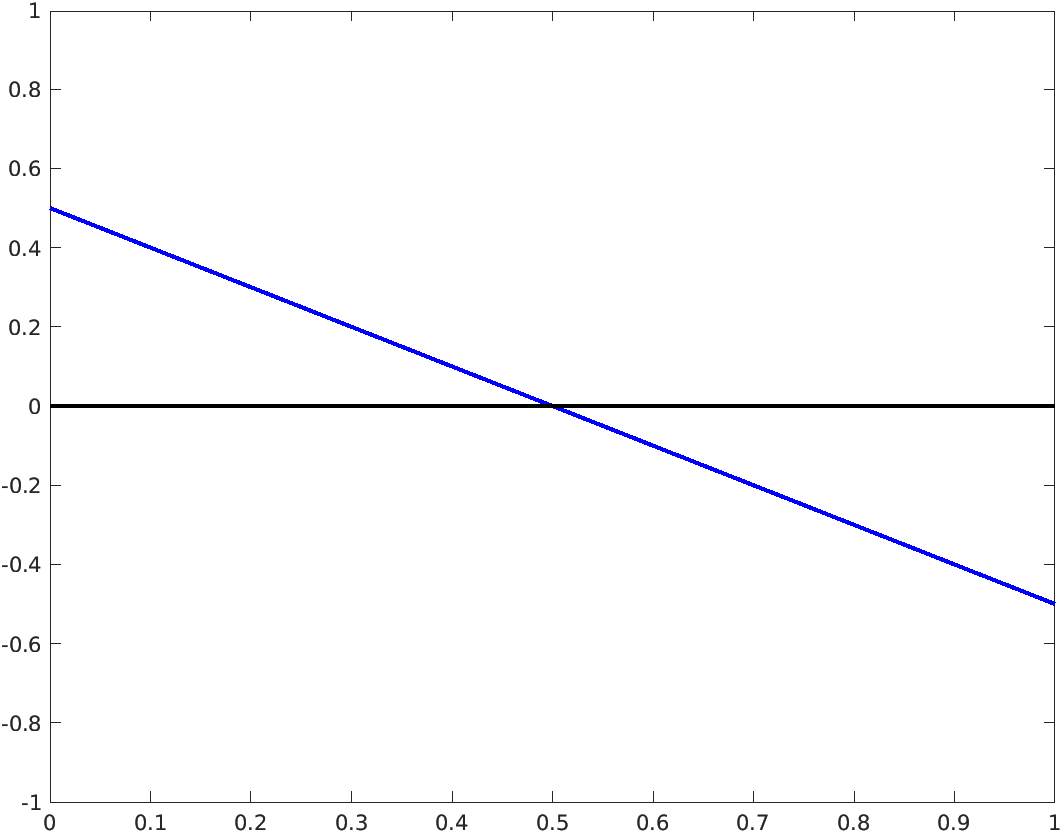
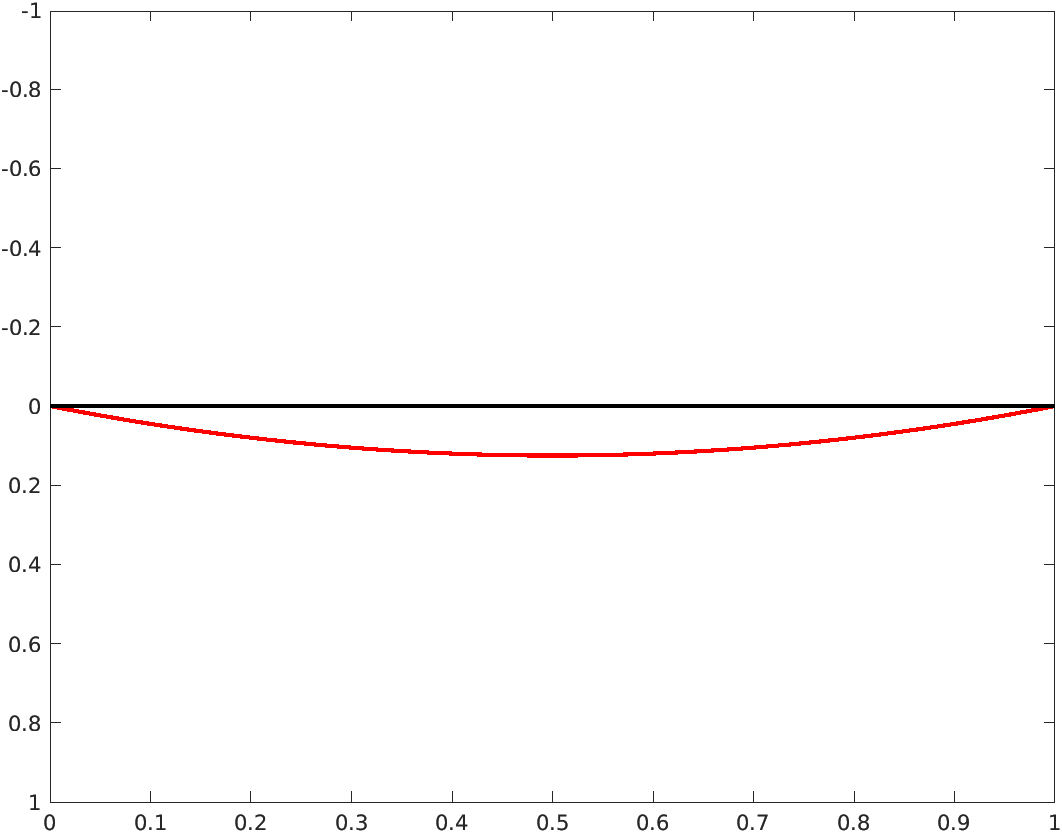
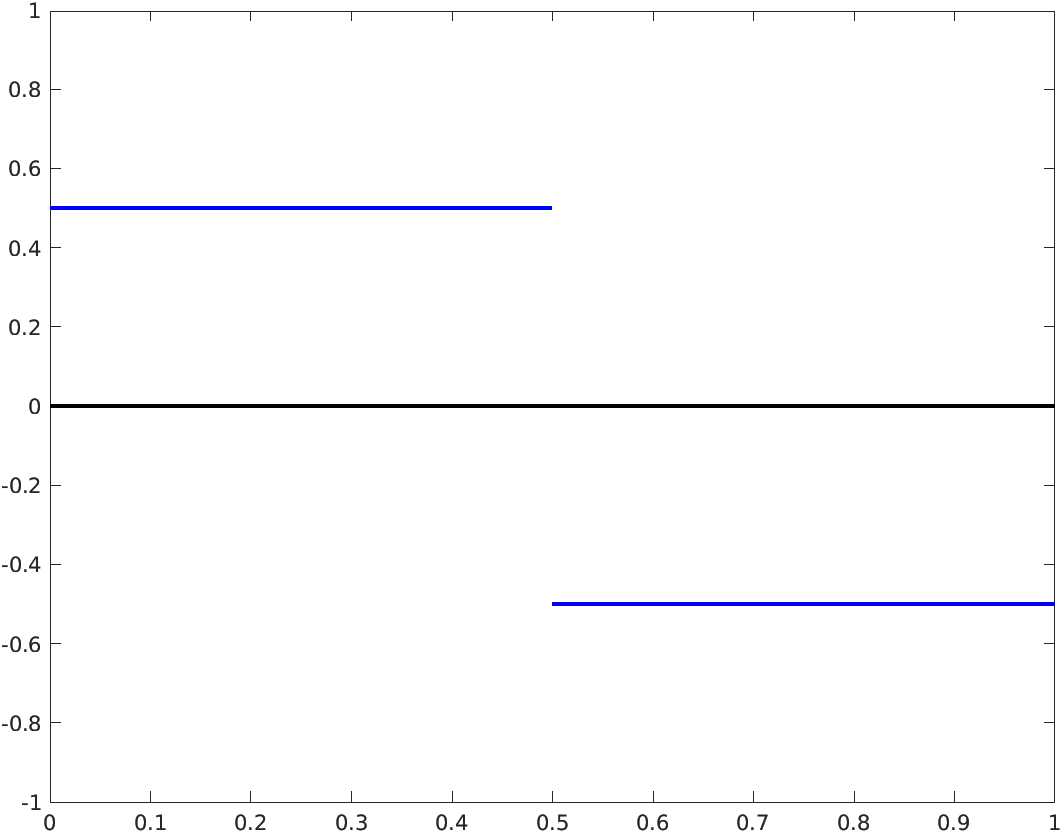
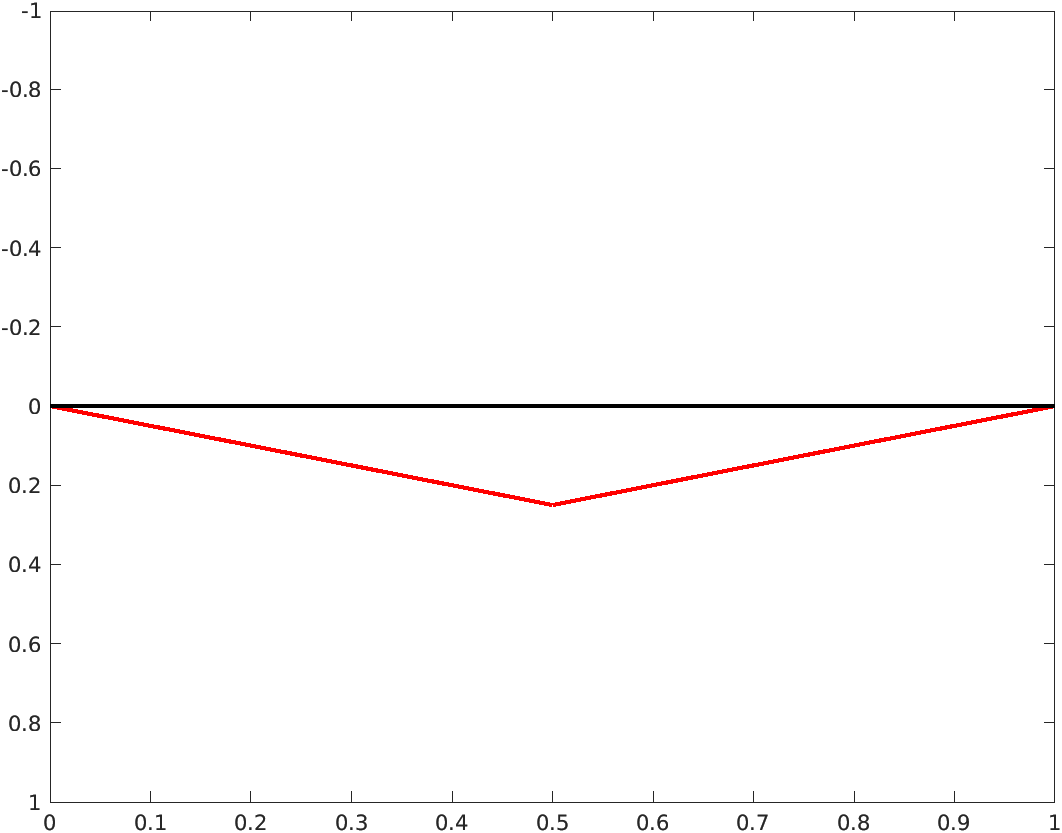
Rispetto ai casi precedenti, il caso in esame è comunque differente poiché la forza concentrata in mezzeria determina una discontinuità del taglio \(T(x)\) e quindi, essendo \(dM/dx=T\text{,}\) anche una discontinuità della derivata del momento flettente. Pertanto gli integrali generali (5.8.13), (5.8.14) e (5.8.15) non sono applicabili direttamente al tratto di trave \(AB\) ma devono essere applicati separatamente ai tratti di trave \(AC\) e \(CB\text{.}\) In tal modo si ottengono due rappresentazioni delle sollecitazioni \(T(x)\) e \(M(x)\text{,}\) una rappresentazione valida per il tratto \(AC\) ed un’altra per il tratto \(CB\text{.}\)
Tratto \(AC\text{,}\)\(0 \leq x \leq l/2\text{:}\)